服务器
微信
尚品汇
知识蒸馏
网络技术
dirs
力扣
dxf
delete
dockerfile
信息安全管理与评估
mutex
质量管理
firefox
java云原生
Eolink
word2vec
外观模式
BBRv2
漏洞分析
ROS2
2024/4/11 14:28:42
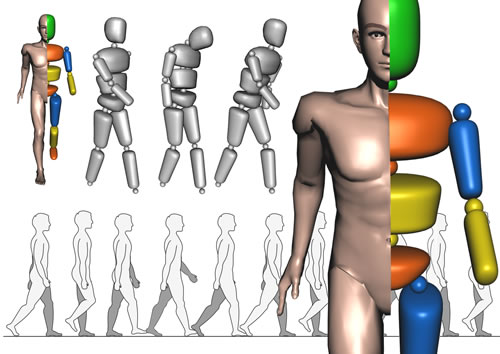
蒙特卡罗方法对 Webots仿真机器人(ROS2)地图定位
概述
移动机器人必须解决的主要问题之一是知道它在其环境中的位置。确定机器人相对于其环境的位置和方向(机器人姿态)的过程称为定位。
在不知道它在其环境中的位置的情况下,机器人可以执行的任务非常有限。因此,这是它要解决的…
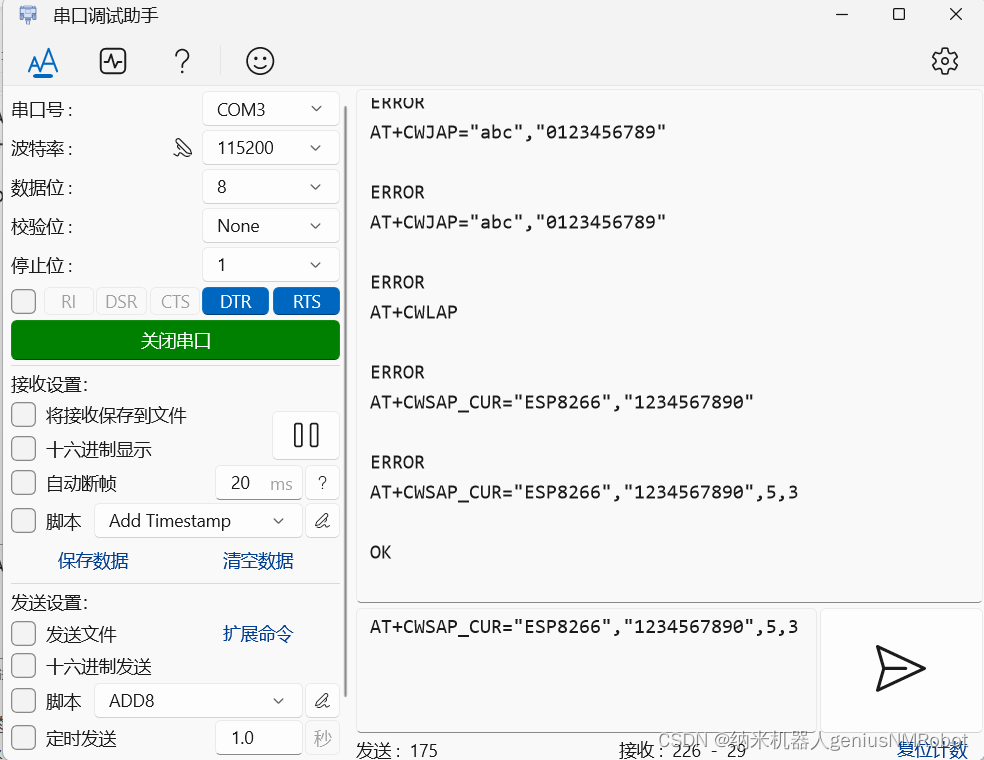
stm32 WIFI模块_8266使用
使用以上配置可以正常回应,其中无论勾选或者不勾选DTR/RTS都可以得到正常回应 ATCWMODE?表示查询当前WiFi状态是处于热点模式(AP模式)或者是连接其他WiFi的那个模式。通过图片看出这个符号不能省略。 设置AP热点命令格式:ATCWSAP…
roslaunch格式
The roslaunch package comes with roslaunch tool as well as several support tools to assist in the process of launching ROS Nodes.
目录
roslaunch Launch syntaxPassing in argsNon-launch optionsInternal-use only optionsEnvironment Variables (advanced users)…
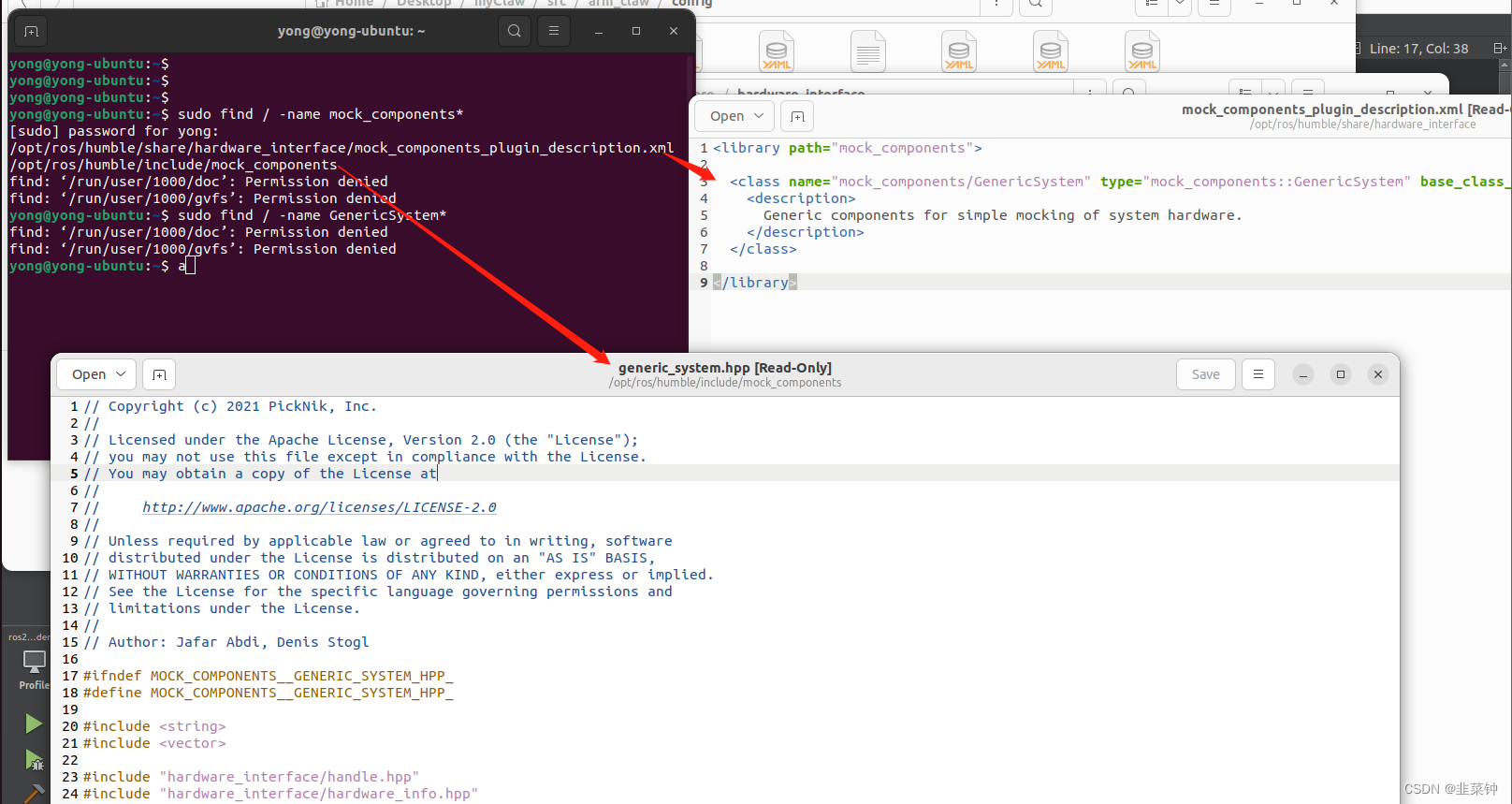
ros2_control的简单应用
文章目录 简介插件实现函数介绍代码 调用原理局限性 简介
在利用moveit_setup_assistant配置我们自己机械手后,当运行demo.launch.py时,会实例化一个moveit对象以及一个基于ros2_control的、虚拟的控制对象,从而可以实现一个完整的控制闭环。…
cmake 时 ros2有关库报错:module ‘em‘ has no attribute ‘BUFFERED_OPT‘
是 empy 的版本与python版本不适配,python3.8.10 需要下载 empy3.3.2版本 pip install empy3.3.2
CMake Error at /opt/ros/foxy/share/rosidl_adapter/cmake/rosidl_adapt_interfaces.cmake:60 (message):
execute_process(/home/yrj/anaconda3/bin/python3 -m ro…
ROS2教程02 ROS2的安装、配置和测试
ROS2的安装和配置
版权信息
Copyright 2023 Herman YeAuromix. All rights reserved.This course and all of its associated content, including but not limited to text,
images, videos, and any other materials, are protected by copyright law.
The author holds a…

将本地工作空间robot_ws上传到gitee仓库
git config --global user.name "geniusChinaHN"
git config --global user.email "12705243geniuschinahnuser.noreply.gitee.com"
cd ~/robot_ws
#git init#创建原始仓库时候用
git add .
git commit -m "上传文件内容描述"
#git remote add r…
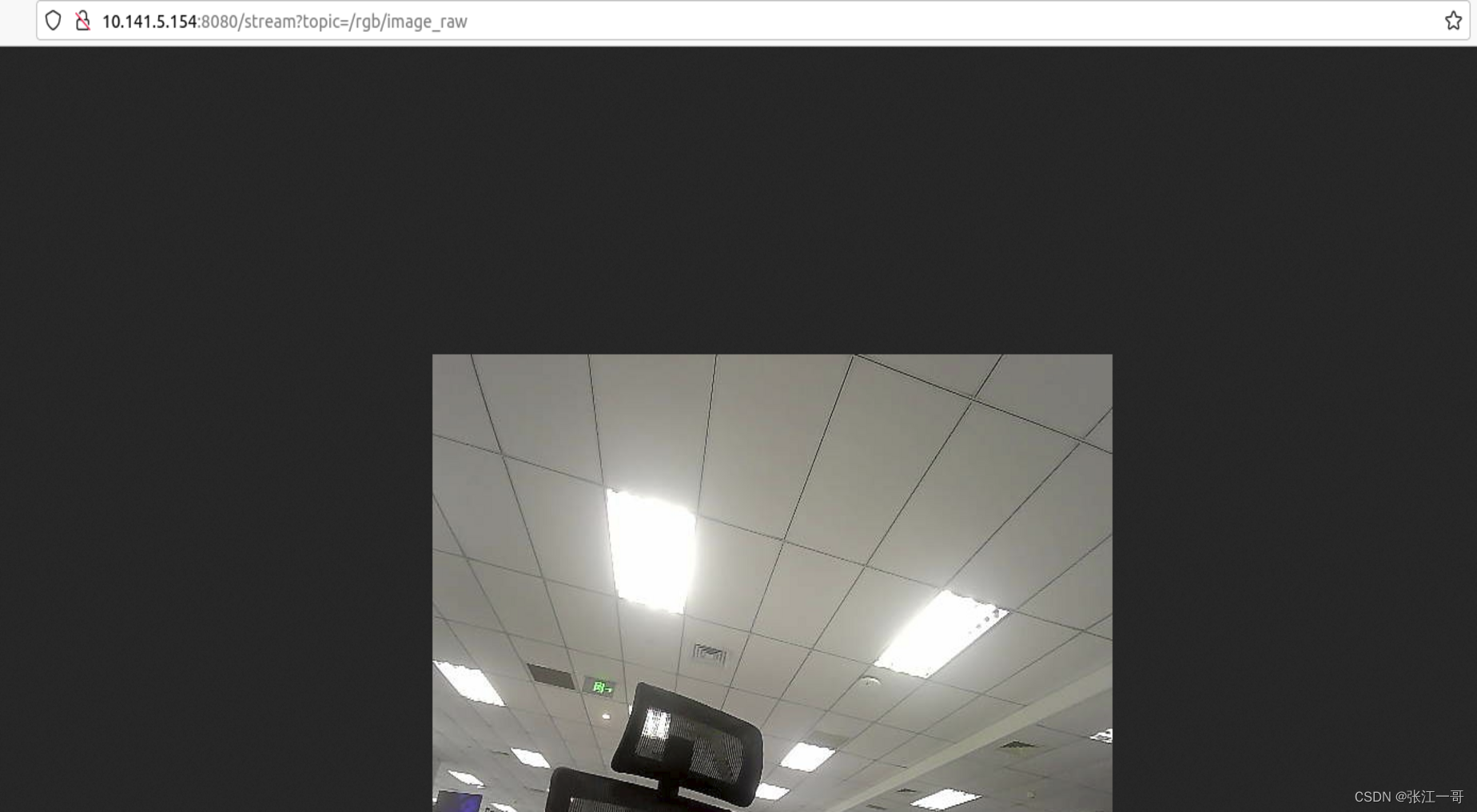
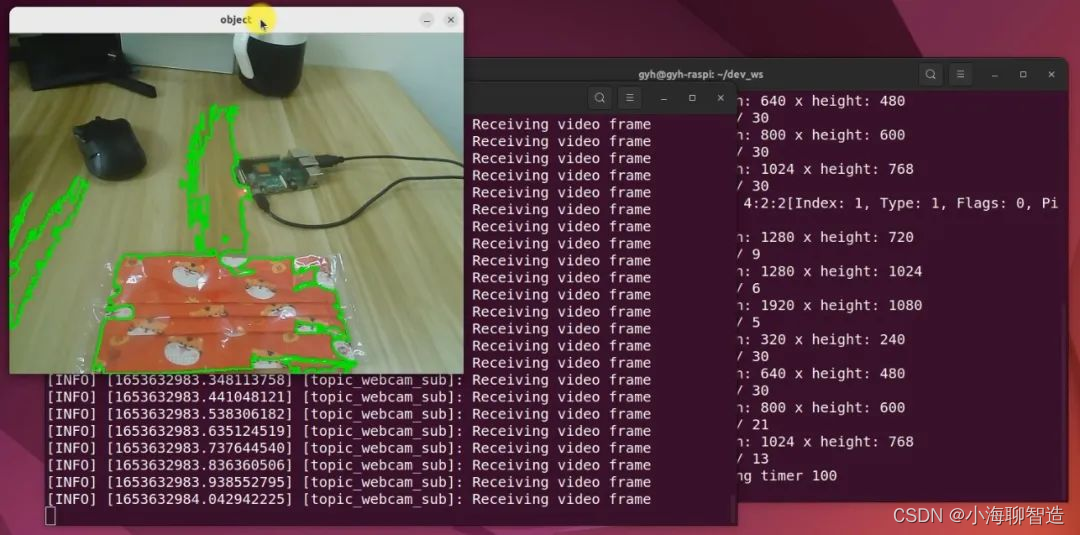
网页显示摄像头数据的方法---基于web video server
1. 背景:
在ros系统中有发布摄像头的相关驱动rgb数据,需求端需要将rgb数据可以直接在网页上去显示。
问题解决:
web_video_server功能包,相关链接:
web_video_server - ROS Wiki
2. 下载,安装和编译&a…

ros2智能指针转换为普通指针
智能指针转换为普通指针转换公式为:
智能指针.get()普通指针
------------------------------------------------------------------------------------
普通指针转换为智能指针的转换公示:
std::shared_ptr<类型> name(普通指针࿰…
ros2安装---全程看得见的代码安装ros2
1: 这个代码使用了国内的gitee仓库获取到了key文件,解决了ros.key问题,这个仓库是我自用的,你要是用了也可以,但是你就前我一个人请
2:使用了清华下载
3:从此再也不用出意外了
4:…
Fast-DDS 编译demo
1、FastDDS源码下载链接
2、下载编译 (注意)之前docker中已经安装好ros环境。如果没安装会有Fast-DDS依赖
$git clone https://github.com/eProsima/Fast-DDS
$mkdir build
$cd build
$cmake -DCOMPILE_EXAMPLESON -DCMAKE_BUILD_TYPEDebug -DINTERNAL…
一个奇怪的蓝牙模块分析记录
蓝牙标识PZ-BT11
从这个蓝牙通电后的表现可以看到有2个蓝牙,其中一个带有BLE标识,可能是一个双模蓝牙
首先这不是一个普通的JDY蓝牙,
因为普通JDY蓝牙只有1个蓝牙信号(从手机搜索蓝牙)
这可能是一个BLE蓝牙
因为B…
ROS2学习笔记二:开发准备
目录
1 DDS介绍
2. 工程介绍
4 构建工具colcon
5 启动一个节点 1 DDS介绍
DDS,全称 Data Distribution Service (数据分发服务)。是由对象管理组 (OMG) 于 2003 年发布并于 2007 年修订的开分布式系统标准。通过类似于ROS中的话题发布和订阅形式来进行通信&…

2 ROS2话题通讯基础(1)
2 ROS2话题通讯基础 2.1 ROS2话题通讯介绍2.2 ROS2常用的消息类型介绍2.2.1 std_msgs消息类型2.2.2 geometry_msgs消息类型 2.3 使用C/C创建基础消息类型的话题通讯2.3.1 创建C/C发布话题信息的功能包并配置VSCode环境2.3.2 编写ROS2发布话题节点CPP文件2.3.3 配置C/C发布话题功…
stm32超声波测距不准的解决方法(STM32 delay_us()产生1us)及stm32智能小车超声波测距代码(C语言版本)
首先要说明一下原理:使用stm32无法准确产生1us的时间,但是超声波测距一定要依赖时间,时间不准,距离一定不准,这是要肯定的,但是在不准确的情况下,要测量一个比较准确的时间,那么只能…

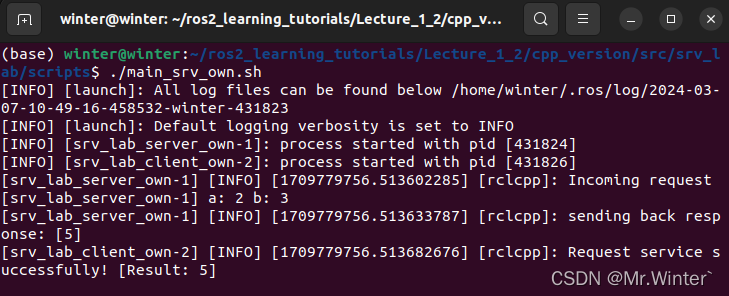
ROS2 编写Service和Client
https://blog.csdn.net/wei242425445/article/details/115278114 按照上文的描述编写自定义消息后,我们就可以开始编写服务了
创建包
$ ros2 pkg create --build-type ament_cmake cpp_srvcli编写service 具体代码如下
#include "rclcpp/rclcpp.hpp"
#…

Ubuntu22.04_如何调试ROS2_humble的源代码
这里的源码,是指的ros2 humble的官方源码。如果是自己手撸的节点或相关源码,请参考本人以前的贴子,
Ubuntu20.04vscode快速调试ROS通用程序_ubuntu20.04vscode那个版本和ros 兼容_高精度计算机视觉的博客-CSDN博客
Ubuntu20.04+…

ROS2 Tutorial
如果需要查看ROS2的安装和基本的使用,可查看 https://blog.csdn.net/wei242425445/article/details/115186263
创建目录
$ mkdir -p ~/dev_ws/src
$ cd ~/dev_ws/src拉取代码
$ git clone https://github.com.cnpmjs.org/ros/ros_tutorials.git -b foxy-devel
$ …
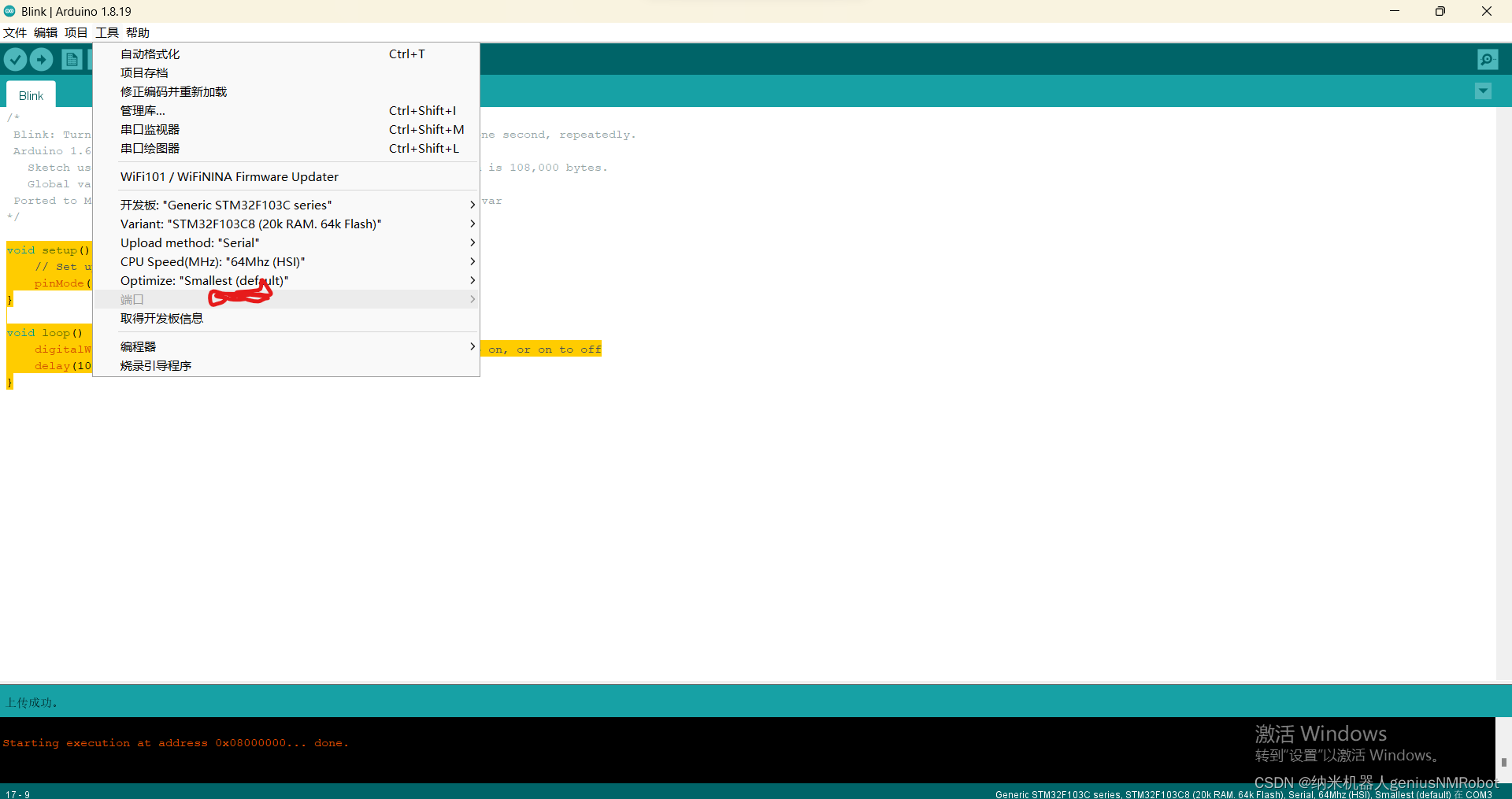
我的第一个Arduino点灯程序
我简直难以相信,什么都不用配置,就这么几行代码,就可以blink了
void setup() {// Set up the built-in LED pin as an output:pinMode(PA1, OUTPUT);
}void loop() {digitalWrite(PA1,!digitalRead(PA1));// Turn the LED from off to on, o…
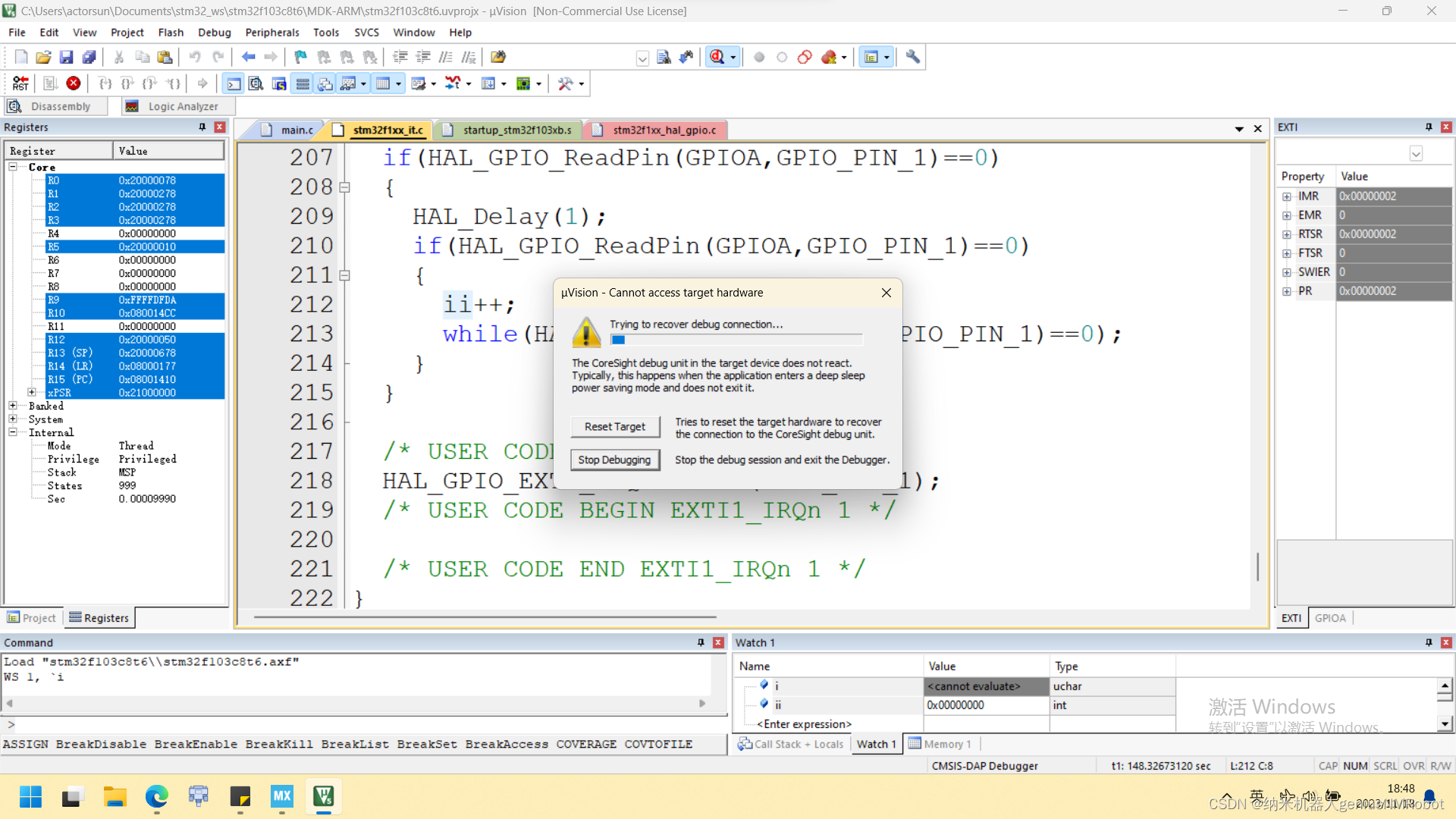
STM32硬件调试器不一定准确,proteus不一定准确
我在做实验的过程中,发现里面的那个变量ii一直都不变搞了很久没有发现问题,
然后怀疑是不是软件出了问题,然后直接只用单片机的一个灯泡来检测是否正常,发现:单片机里面正常,但是硬件调试的时候࿰…
基于ubuntu20.04的 ros2(foxy版本)安装
建议最好参考官方的安装指南
Ubuntu (Debian) — ROS 2 Documentation: Foxy documentation 也可参考下面的步骤
1.安装ros2
(1)设置编码
sudo apt update
sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_AL…

ros2/ros安装ros-dep||rosdep init错误
第一个错误的做法:
sudo apt-get install python3-pip sudo pip3 install 6-rosdep sudo 6-rosdep
如果使用上述代码将会摧毁整个系统,不重装系统反正我是搞不定啊,因为我不知道那个写软件的人到底做了什么。因为这个我安装的版本是humble&…
【ROS】ROS2编程示例:动作-C++版
1、准备
1)安装ROS2 【ROS】Ubuntu22.04安装ROS2(Humble Hawksbill)
2)ROS2命令 【ROS】ROS2命令行工具详解
3)配置工作空间 【ROS】ROS2中的概念和名词解释中第一节:工作空间 workspace
4)…
交叉编译工具链makefile
linux系统默认搜索头文件地址:/usr/include/文件夹;
Windows系统默认搜索头文件地址:不同软件好像可以设置不同的地址;例如visual studio好像可以设置附加包含目录,包含目录等
Linux系统库文件路径:/lib文…
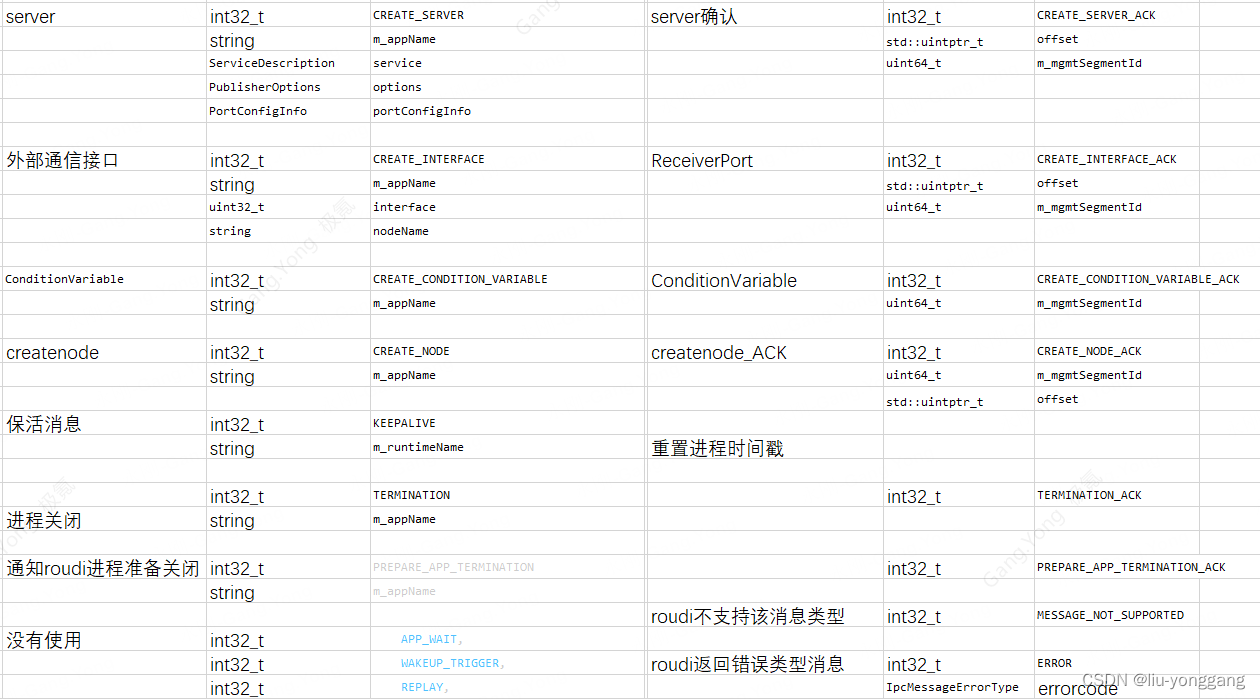
iceoryx(冰羚)-进程间消息同步
iceoryx进程间消息同步 iceoryx进程间消息同步,是用socket或管道实现的,定义在iceoryx\iceoryx_posh\include\iceoryx_posh\internal\runtime\ipc_interface_base.hpp
namespace platform
{
#if defined(_WIN32)
using IoxIpcChannelType iox::posix::NamedPipe;
…

ros2+gazebo建立机器人
Building your own robot In this tutorial we will learn how to build our own robot in SDFormat. We will build a simple two wheeled robot.本文用SDF文件建立一个2轮机器人
You can find the finished SDF file for the tutorial here.SDF文件点击下载
What is SDF SD…
STM32使用多路PWM注意事项
这是使用CubeMX自动产生的代码,使用TIM2产生了PA0,PA1,PA2,PA3这4路PWM,可以看到里面Pulse是共同使用了一个sConfigOC,如果是需要动态调整Pulse,就需要特别注意。 如果是用来产生呼吸灯,就会把这4个PWM都打乱,我觉得&a…
制作一个ros2机器人需要学习的课本(还不全面)
1《C语言》---这个是基础200页左右
2《C》-----500-600页
3《高等数学》-----没有这个无法计算动态电路
4《电路分析》-----没有这个没法设计硬件电路
5《英语5000词汇》最少也得达到美国小学生毕业时候的词汇水平5000词汇量
6《ros1》因为ros2没有一本中文课本---有那么一…
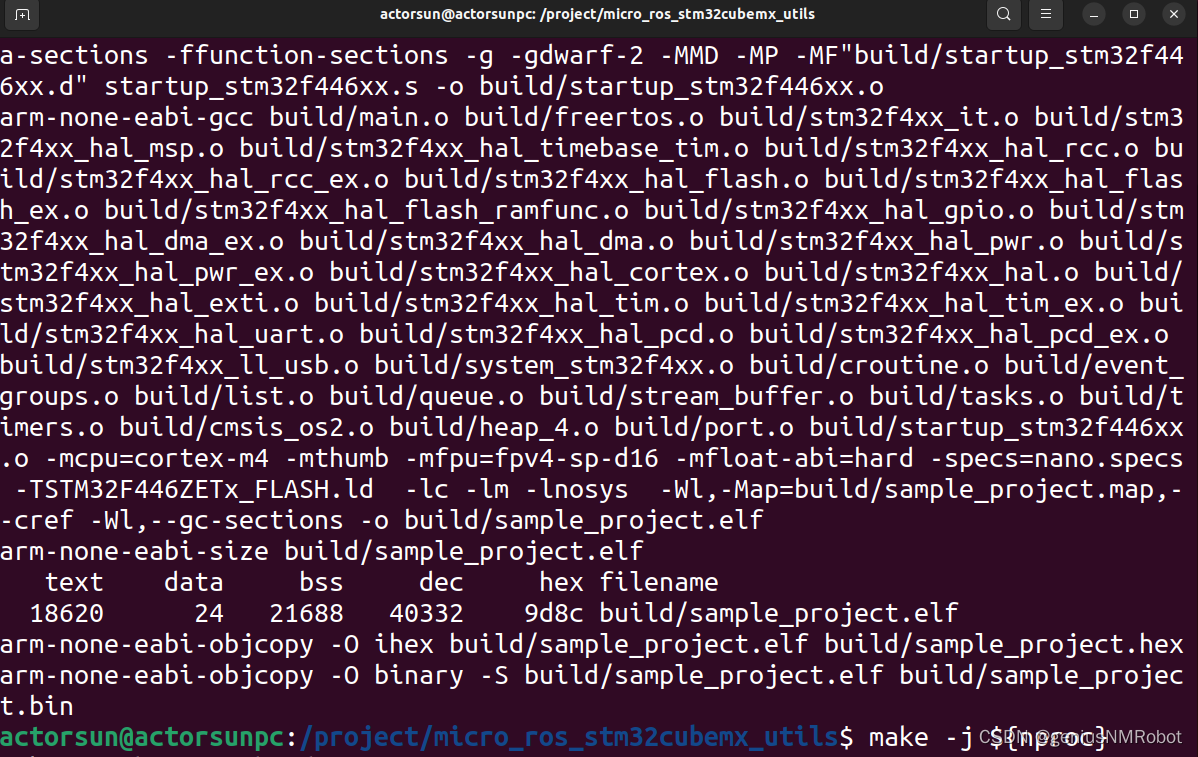
arm-none-eabi-gcc not find
解决办法:安装:gcc-arm-none-eabi
sudo apt install gcc-arm-none-eabi;
如果上边解决问题了就不用管了,如果解决不了,加上下面这句试试运气:
$ sudo apt-get install lsb-core看吧方正我是运气还不错,感…
ros2机器人在gazebo中移动方案
原文连接Gazebo - Docs: Moving the robot (gazebosim.org) 很重要的地方:使用虚拟机运行Ubuntu的时候,需要关闭”加速3D图形“的那个选项,否则gazebo无法正常显示。
Moving the robot(使用命令移动机器人示例)
In t…

在moveit2中实现四连杆及曲柄滑块
对于一些特殊的(比如说机械构件闭环的、存在被动关节的)运动模型,该如何用urdf模型描述该模型,且在MoveIt2中进行仿真?下面提供一个思路,仅供参考。
四连杆机构
结构介绍
该机构的组成如下图所示。 粉红…
ros2中ros_gz_bridge/gazebo安装的注意事项
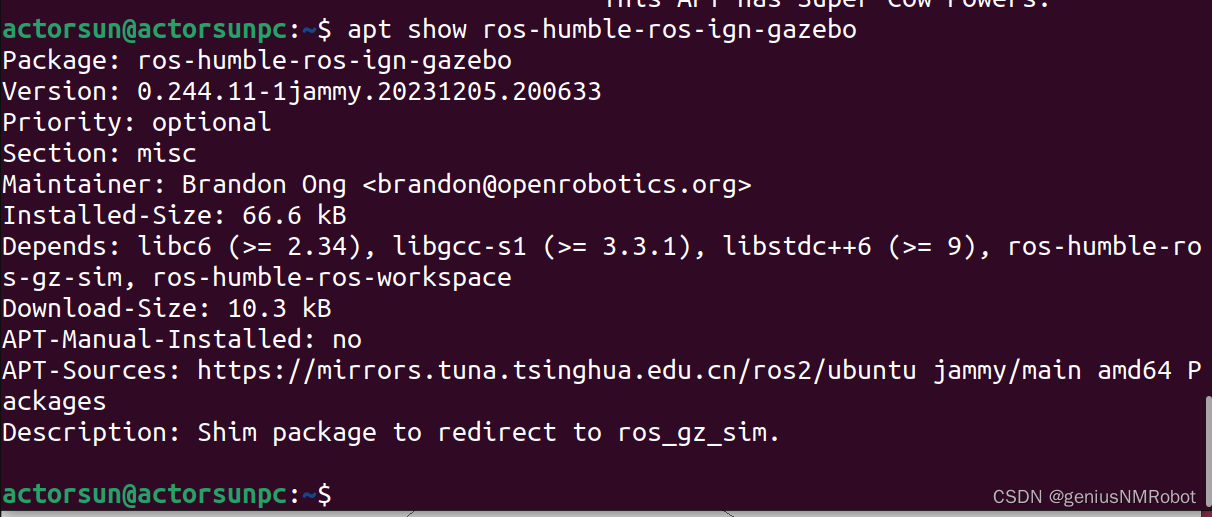
这个搞错了:这个是安装ros_gz_bridge的,不是安装gazebo的 AT:如果是安装的Harmonic,在安装ros_gz_bridge的时候要从源码编译 ros2完整版里面好像已经包含了gazebo的一个版本 包名应该就是叫ros-humble-ros-ign-gazebo 所以gazebo是作为一个普…
ROS2串口通讯serial库(适用于humble版本)
要的串口操作的API介绍在这里:serial: serial::Serial Class Reference (wjwwood.io) 但是我们不是直接利用上面这个东西,而是使用的是根据这个改写的一个针对ros2的一个serial库,这个serial库是根据上面这个库改写来的,ros2的库在…
stm32单片机无法驱动sg90舵机
如果使用调试器调试sg90的时候,也许会遇到舵机没有反应的情况,这个时候可以把调试器断开,直接使用usb线接到单片机上面,舵机就会开始动,需要注意的是3.3V也是可以驱动sg90的,虽然标的是5V
vue3中使用Three.js及ROS2绘制机器人3D图形
要实现机器人3D位置的显示,你需要使用ROS2和Vue3结合开发。
首先,在Vue3中创建一个3D场景,你可以使用Three.js库来创建。Three.js是一个用于创建和渲染3D图形的JavaScript库,可以轻松创建3D场景、3D对象、光线等。
接下来&#…
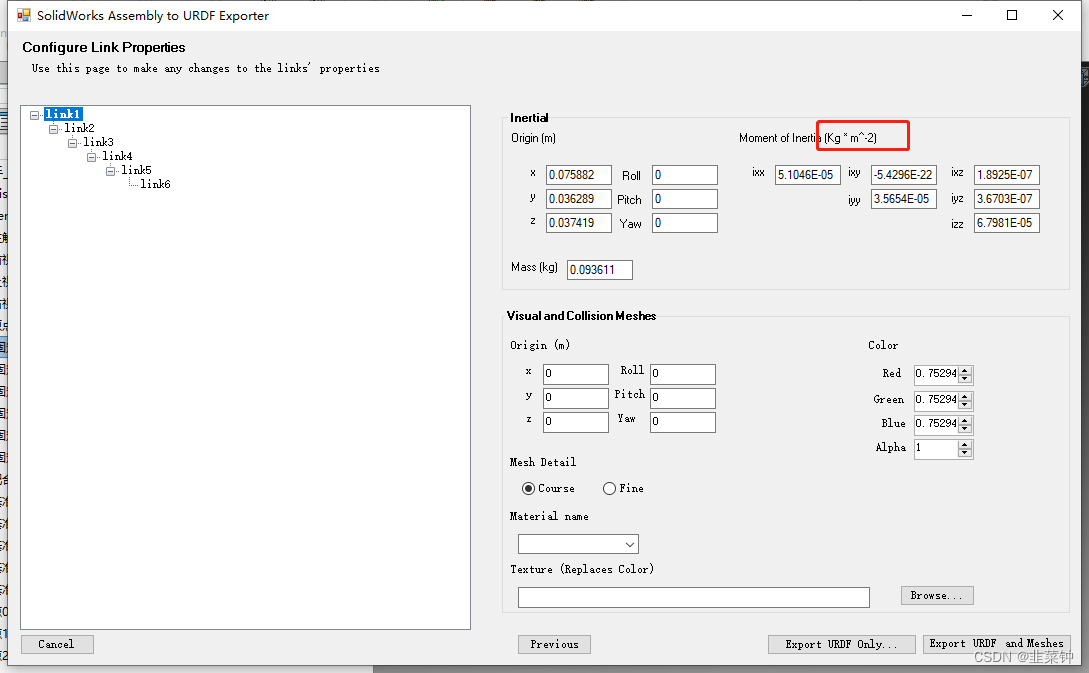
sw2urdf导出的urdf文件中的惯性参数(inertial)错误的问题
现象描述
有时候,当我们使用solidworks建好我们的模型,然后利用【sw2urdf】导出后,发现其中的惯性参数,似乎不正确,ixx、izz这些参数都是很接近0的:
资料查找
其实这个不是我们设置的问题,而…
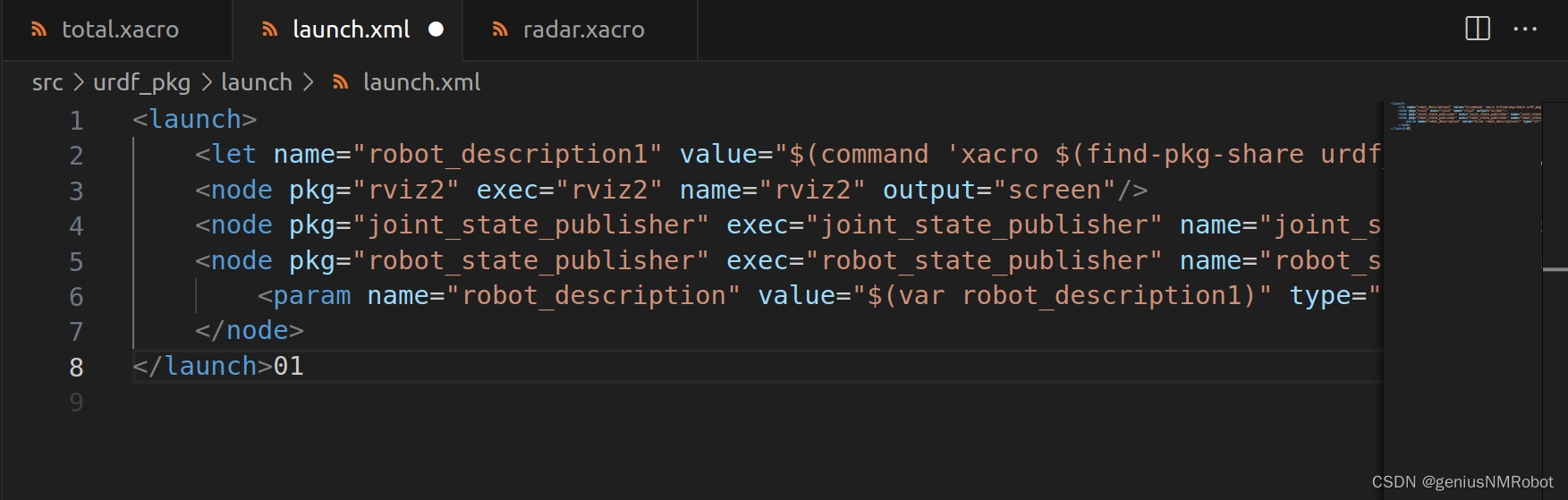
Caught exception in launch(see debug for traceback)
Caught exception in launch (see debug for traceback): Caught exception when trying to load file of format [xml]: Caught exception when trying to load file of format [xml]: junk after document element: line 8, column 9 罪魁祸首: 看吧我在launch文件…

ROS2的安装与使用
安装说明
安装ROS2
$ sudo apt update
$ sudo apt install curl gnupg2 lsb-release
$ curl http://repo.ros2.org/repos.key | sudo apt-key add -
$ sudo sh -c echo "deb http://packages.ros.org/ros2/ubuntu lsb_release -cs main" > /etc/apt/sources.li…
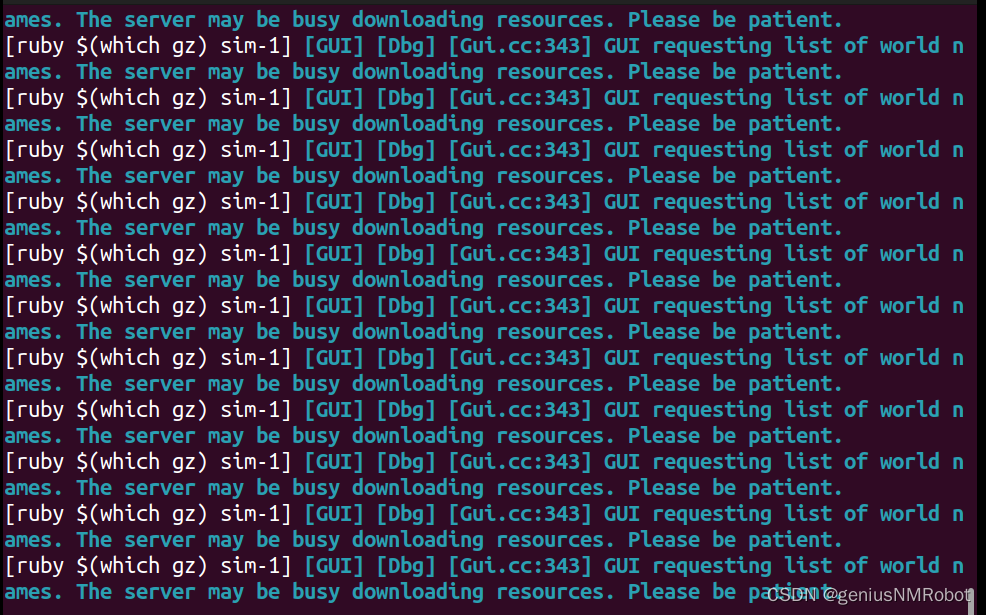
gazebo卡住不动
可以看到这个sdf文件里面含有网络连接,有的sdf文件看上去几十个kb,
以为很小,但是里面含有网络连接就不知道有多大了,所以也可能会卡住,然后就会出现这个
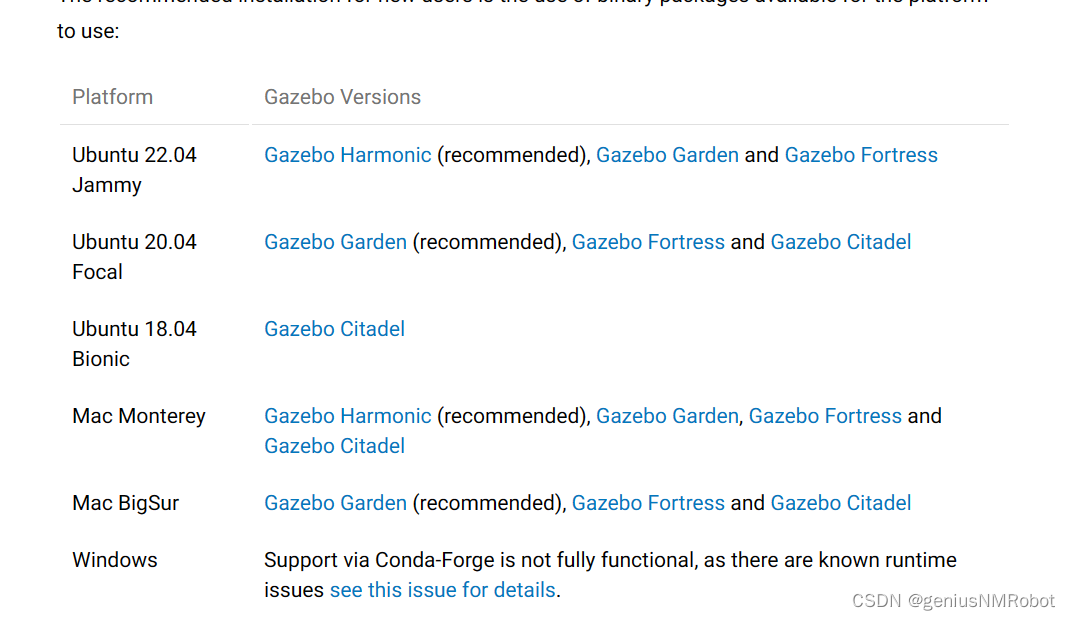
ubuntu22.04+ROS2推荐匹配的gazebo版本
放大以后看到: 可以看到ros2推荐使用版本是humble-----匹配的是Ubuntu22.04LTS -------匹配gazebo Harmonic
【ROS2】学习笔记
1. 基础概念
1.1 执行单元
1.1.1 executable——执行程序
executable表示针对某个目标的程序执行流程,一个executable可以启动多个node;
1.1.2 node——“进程”
node其实就是进程的意思; ROS2允许同时启动两个相同的node,&a…
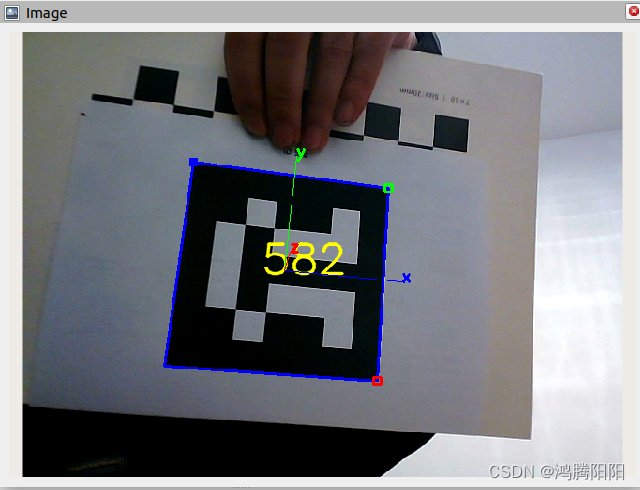
ros2(humble)+ArUco markers
1、环境:
Ubuntu22.04ros2 humbleUSB camera
2、下载 aruco_ros
aruco_ros 下载地址
mkdir -p ros2_ws/aruco_ws/src && cd ros2_ws/aruco_ws/src # 创建工作空间# 克隆分支; https://mirror.ghproxy.com为github代理
git clone https://mir…
![[ROS2] --- ROS diff ROS2](https://img-blog.csdnimg.cn/direct/c25ce5abdba5420bbf66aafbfe59fb4d.png)
[ROS2] --- ROS diff ROS2
1 ROS存在的问题
一旦Ros Master主节点挂掉后,就会造成整个系统通信的异常,通信基于TCP实现,实时性差、系统开销大对Python3支持不友好,需要重新编译消息机制不兼容没有加密机制、安全性不高
2 ROS and ROS2架构对比
ROS和ROS2架构如下图所…
Ros2 -humble在windows10上的安装指南
Ros2 -humble在windows10上的安装指南
下载包在github上,我下载的是 ros2-humble-20230724-windows-debug-amd64.zip 和 ros2-humble-20230724-windows-release-amd64.zip
首先,按要求安装chocolatey,
Install Chocolatey for Individual …
(HAL库版)freeRTOS移植STMF103
正点原子关于freeRTOS的教程是比较好的,可惜移植的是标准库,但是我学的是Hal库,因为开发速度更快,从最后那个修改SYSTEM文件夹的地方开始替换为下面的内容就可以了
5.修改Systick中断、SVC中断、PendSV中断 将SVC中断、P…
ORBBEC(奥比中光)AstraPro相机在ROS2下的标定与D2C(标定与配准)
文章目录 1.rgb、depth相机标定矫正1.1.标定rgb相机1.2.标定depth相机1.3.rgb、depth相机一起标定(效果重复了,但是推荐使用)1.4.取得标定结果1.4.1.得到的标定结果的意义 1.5.IR、RGB相机分别应用标定结果1.5.1.openCV应用标定结果1.5.2.ros…
Windows11 - Ubuntu 双系统及 ROS、ROS2 安装
系列文章目录 前言 一、Windows11 - Ubuntu 双系统安装
硬件信息:
设备名称 DESKTOP-B62D6KE
处理器 13th Gen Intel(R) Core(TM) i5-13500H 2.60 GHz
机带 RAM 40.0 GB (39.8 GB 可用)
设备 ID 7673EF86-8370-41D0-8831-84926668C05A
产品 ID 00331-10000-0000…
ubuntu20.04中ros2安装rosbridge及启动方式
ros2 启动rosbridge:
要启动ROS2中的rosbridge,需要先安装ROS2的rosbridge_suite软件包。使用以下命令安装:
sudo apt-get update
sudo apt-get install ros-<distro>-rosbridge-suite将<distro>替换为正在使用的ROS2发行版的名…
windows构建ROS2 Android App
windows构建ROS2 Android App
升级到ROS2之后,由于架构的不同,导致ROS1的Android App已经无法使用了,所以我们需要通过ROS2 java构建出Android的依赖库
环境要求 window10以上wsl(我用的是WSL构建的,你也可以用linux虚拟机)docker(安装的时候选择WSL)Ubuntu 18.04以上…

Ubuntu为什么键盘会出现乱字符
今天上午起来只是要简单打一个命令,需要输入一个"双引号,但是总是显示,我一开始以为是中了病毒,把键盘给改了,后来发现虚惊一场:出现这个原因是因为ubuntu的键盘设置有问题。
我把键盘设置为英国英语…
在ROS2中一次性将缺失的依赖包装好
在ROS 2中,可以使用rosdep工具来一次性安装编译ROS 2包所需的所有缺失依赖。rosdep会检查你的ROS 2工作空间中所有包的package.xml文件,并自动安装所有列出的依赖项。以下是如何操作的步骤:
确保你的ROS 2环境已经激活。打开一个终端并激活环…
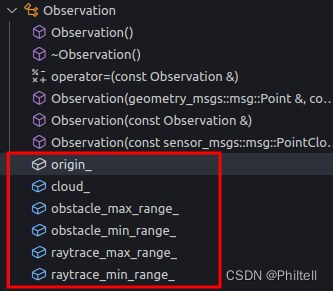
基于ROS2的costmap中Obstacle Layer中对障碍物信息的增加与删除机制的方案调研。
文章目录 1.背景2.目标3. 障碍物信息添加方式发送数据的数据结构与接收数据的数据结构 4. 障碍物清理机制4.1 可调参数4.2 优化光追算法4.3 障碍物跟踪 1.背景
基于costmap地图,使用navigation导航时,会出现由于激光雷达/图像测距的局限性, …
如何使用nuScenes数据集格式的单帧数据推理(以DETR3D为例)
【请尊重原创!转载和引用文章内容务必注明出处!未经许可上传到某文库或其他收费阅读/下载网站赚钱的必追究责任!】
无论是mmdetection3D还是OpenPCDet都只有使用数据集(使用哪个数据集由配置文件里指定)训练和测试的代码,没有使用…

freeRTOS下载链接(sourceForge)
FreeRTOS Real Time Kernel (RTOS) download | SourceForge.net 文件名:FreeRTOSv202212.00.exe
双击后会自动变成这个样子的: 文件夹大小:506M 可以看到跟那个教程里面的文件结构是一模一样的,所以很可能是同一个最新版本的文件…
ROS2 学习(文章链接汇总)
参考引用 动手学 ROS2 持续更新中… ROS2 学习(一)ROS2 简介与基本使用 ROS2 学习(二)ROS2 节点通信详解 ROS2 学习(三)ROS2 机器人建模与仿真 ROS2 学习(四)Navigation2 机器人导航…
TypeScript虚拟ROS2激光扫描消息发布订阅
设置虚拟环境
简述:JavaSt环境设置工具和方法。
ROS2 Linux虚拟机 JS 开发环境
简述:下载包含ROS2版等全套软件的虚拟机。
下载和安装 Linux-ROS 2 虚拟机
简述:下载和安装步骤
验证您的 ROS 2 配置
简述:从终端验证
Type…
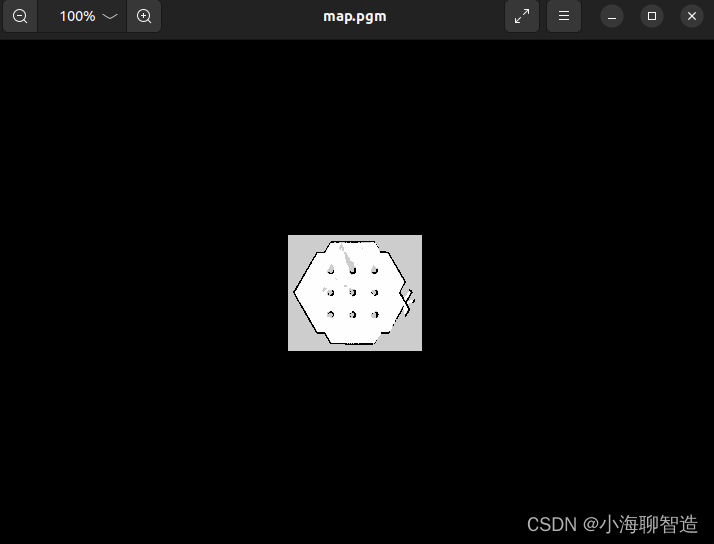
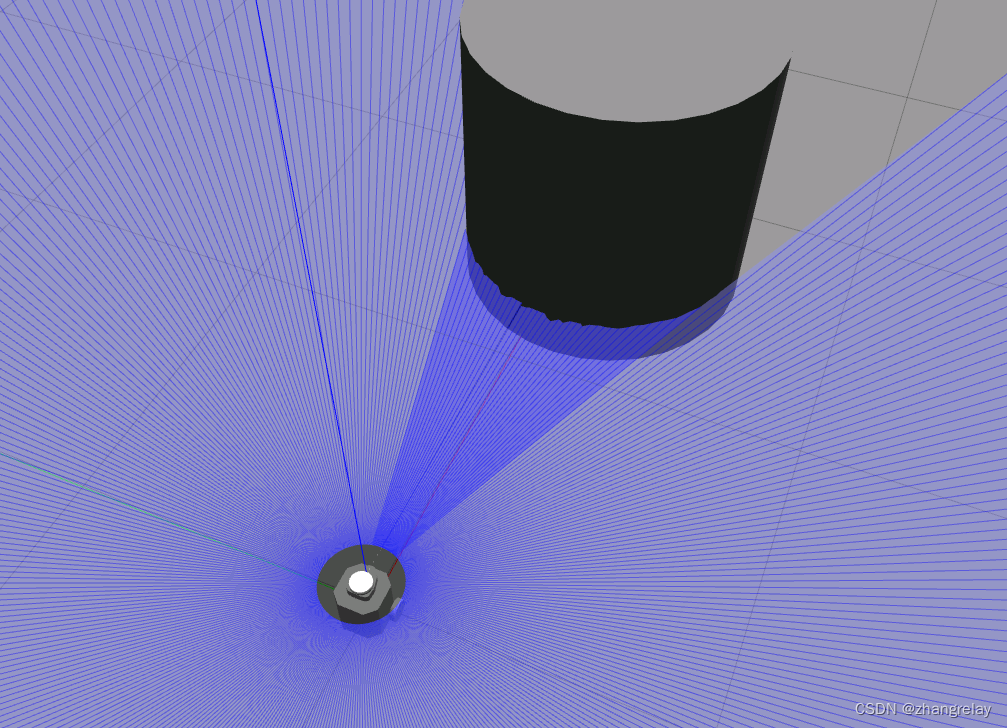
Webots机器人仿真器和ROS2 创建占用概率图算法
概述
自主机器人必须执行的众多任务之一是映射环境。拥有环境地图很重要,因为许多其他任务可能依赖于地图作为先决条件。
对于某些机器人,地图是作为输入给出的,但对于许多其他机器人来说,这是不可能的。机器人必须通过探索环境…
vscode 调试 ROS2
1、在下列目录同层级找到.vscode文件夹
. ├── build ├── install ├── log └── src
2、 安装ros插件 3、创建tasks.json文件,添加下列内容
//代替命令行进行编译
{"version": "2.0.0","tasks": [{"label": &…
cmakelists.txt中install函数/命令
原文链接install — CMake 3.28.1 Documentation
install
Contents install Synopsis Introduction Signatures Examples Example: Install Targets with Per-Artifact Components Example: Install Targets to Per-Config Destinations Generated Installation Script …

ROS2从入门到精通0-4:ROS2核心架构与常用指令大全
目录 0 专栏介绍1 ROS2核心架构1.1 工作空间1.2 功能包 2 ROS2常用指令2.1 功能包相关2.2 节点运行相关2.3 话题相关2.4 参数相关2.4 录制包、播放包相关2.5 服务相关2.6 动作相关2.7 生命周期相关 0 专栏介绍
本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布…
ROS2 学习(三)话题
话题
节点之间的通信。
叫话题很形象。发布者发布一定数据类型的话题,订阅者订阅发布者。 订阅者发布者不唯一。 异步通信,适用于周期发布的数据而不是逻辑性强的数据。 .msg 格式的消息结构,一种通信接口。
每个话题 topic 有话题名&a…
ros2激光雷达<gazebo>仿真资料
Lidar sensor激光雷达传感器
We dont want our robot to touch the wall at all because this may cause some damage, so instead of the contact sensor we can use the Lidar. Lidar is an acronym for "light detection and ranging". This sensor can help us …

一文学会使用键盘控制moveit2机械臂模型
文章目录 前言一、官方样例实现软件版本bug修复运行测试 二、gp110机械臂控制文件添加文件修改编译工程运行测试 总结 前言
在之前文章的基础上相信大家已经学会了如何搭建一个机械臂模型,那么我们如何对其进行控制呢,上网检索了一下没找到能清晰指导实…
树莓派安装64位桌面版Ubuntu教程
事实证明不用显示屏没办法连接64位桌面版的22.04Ubuntu,虽然不用显示屏可以安装64位服务器版的22.04Ubuntu.或者虽然有但是我并不知道,我也不想再花时间去知道了,因为我已经花了3天时间了。
步骤:
1:下载64位22.04Ub…
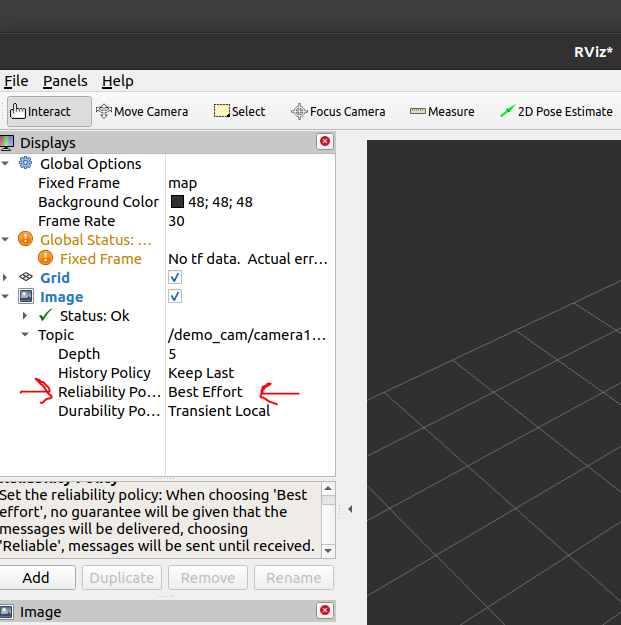
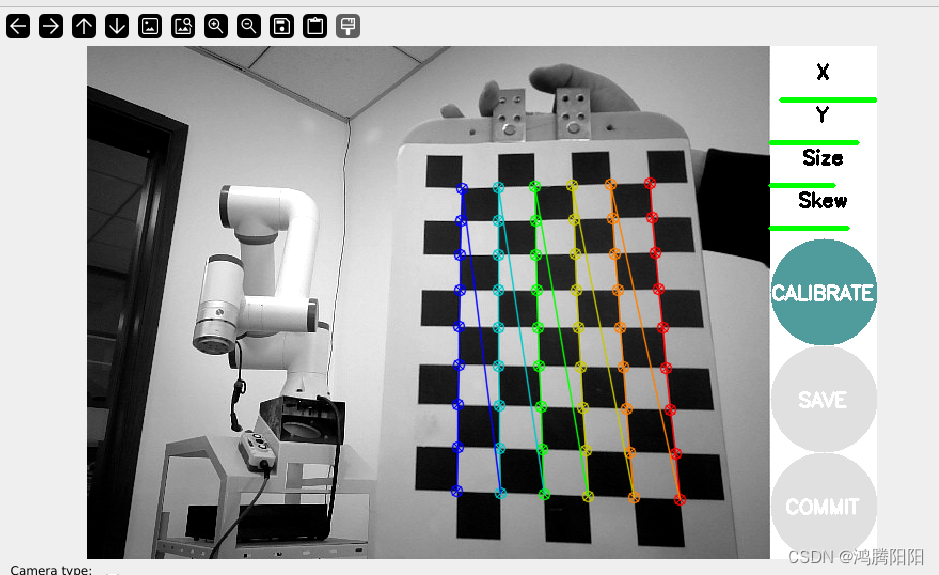
ros2 基础教程-使用ROS 2进行相机标定
ROS 2进行相机标定(Camera Calibration) 相机(摄像头)是一种非常精密的光学仪器,对外界环境的感知非常敏感。由于摄像头内部和外部的一些原因,摄像头采集的图像常常会发生一定的畸变。如果直接将采集到的图…
ros2 学习launch文件组织工程 yaml配置文件
简单范例
功能描述
使用launch文件,统一管理工程,实现img转点云,发送到img_pt的topic,然后用reg_pcl节点进行subscribe,进行点云配准处理,输出融合后的点云到map_pt的topic。最后由rviz2进行点云展示。
…
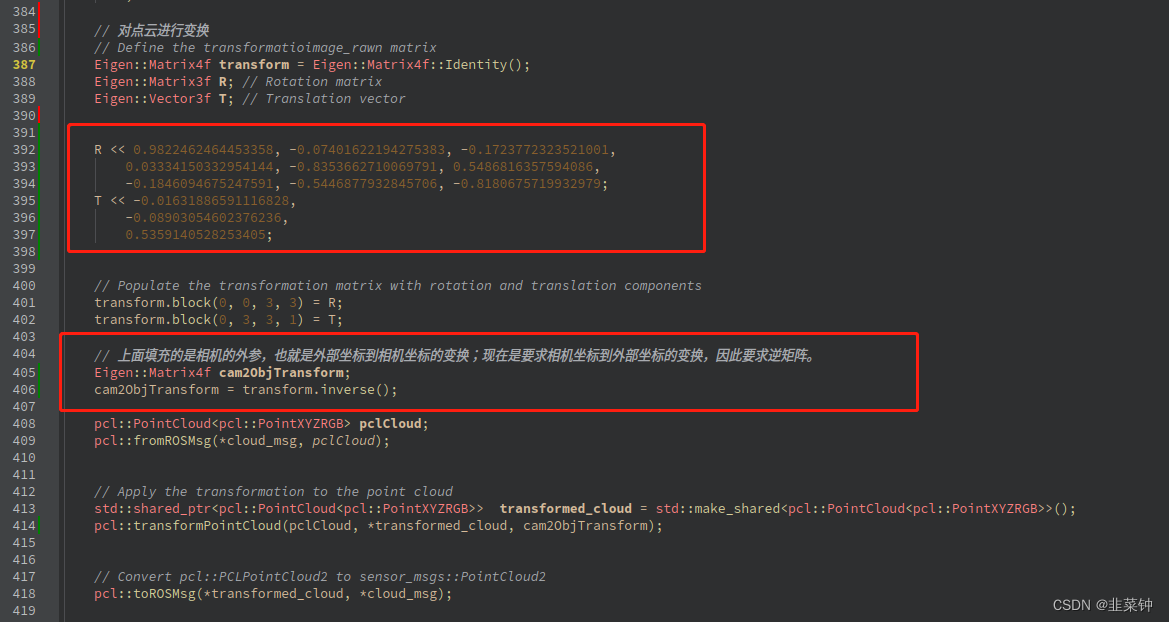
在ros2中获取两个坐标系的外参关系
在终端中,你可以使用 ros2 命令行工具来查看两个坐标系之间的外参关系。这通常通过 tf2_ros 包中的 tf2_tools 来完成。以下是如何在终端中获取两个坐标系之间的外参关系的步骤: 首先,确保你的 ROS 2 系统正在运行,并且正在发布你…
ROS2从入门到精通1-2:详解ROS2服务通信机制与自定义服务
目录 0 专栏介绍1 服务通信模型2 服务模型实现(C)3 服务模型实现(Python)4 自定义服务5 话题、服务通信的异同 0 专栏介绍
本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布式原理,并具有机器人建模和应用ROS2进行实际项目的开发和调试的工程能力。…
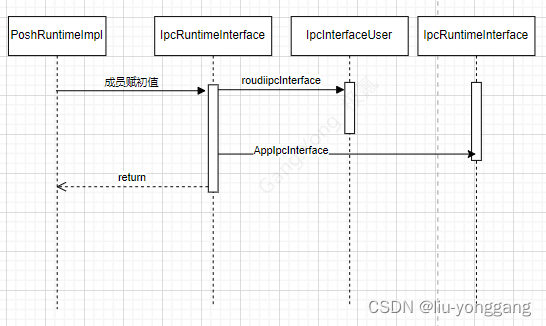
iceoryx(冰羚)-publisher注册RouDi进程
1、发UserApp启动,发布REG消息过程 2、初始化状态转换 3、pub->RouDi 4、sub->RouDi 5、IPC通信 IPC通信支持socket和管道,IpcInterfaceUser ->RouDi进程的socket, IpcInterfaceCreator接收RouDi进程的消息socket。 optional<…
ros2原来本是一个通信协议
3.1 分布式 猛狮集训营
人工智能应用领域教育领导者,更多内容请关注公众号
3.1 分布式
场景
在许多机器人相关的应用场景中都涉及到多台ROS2设备协作,比如:无人车编队、无人机编队、远程控制等等,那么不同的ROS2设备之间是如何…

1 ROS2介绍与安装
1 ROS2介绍与安装 1.1 Ubuntu配置与ROS2安装1.1.1 Ubuntu22.04安装1.1.2 下载安装ROS21.1.3 配置ROS2环境并测试 1.2 使用VSCode搭建ROS2开发环境1.2.1 安装并配置VSCode1.2.2 创建ROS2工程的方法1.2.3 使用VSCode创建ROS2的C/C项目1.2.4 使用VSCode创建ROS2的Python项目 1.3 R…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…
机器人最优控制开源库 Model-based Optimization for Robotics
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD2.2 OCPID-DAE12.3 SNOPT 前言
机器人ÿ…
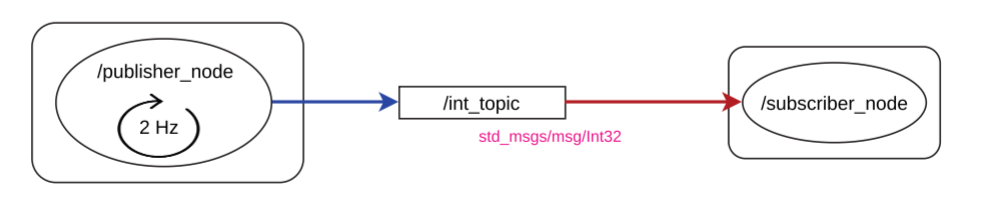
ROS2——发布和订阅
现在我们以主题 int_topic 和发布者 publisher_node 和订阅者 subscriber_node 为例子进行展开。
头文件
在调用各种消息类型时,需要先引用头文件,才能成功声明某一个消息类型的变量。 我们在写头文件时,需要将该类成员的大写字母转换成小写…
ROS2 学习(二)工作空间,节点
工作空间介绍
workspace 是存放整个项目的大目录。
其中包含:
src:源码。
build:编译文件。
install:安装空间,存放编译成功后的目标文件。
log:日志。
我们新建一个工作空间目录,其中包…
Ubuntu20.04安装ROS2
官方参考文章
Ubuntu (Debian) — ROS 2 Documentation: Foxy documentation
curl密钥问题
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
curl: (7) Failed to connect to raw.githubus…

启动gazebo harmonic
ros2 launch ros_gz_sim gz_sim.launch.py gz_version:8 如果不输入gz_version:8,默认就是6,启动的就是默认版本ign版本 左边那个是8,右边那个是6
ros2 基础学习12 分布式通信
智能机器人的功能繁多,全都放在一个计算机里,经常会遇到计算能力不够、处理出现卡顿等情况,如果可以将这些任务拆解,分配到多个计算机中运行岂不是可以减轻压力? 这就是分布式系统,可以实现多计算平台上的任…
ROS2之spin()函数解析(C++版)
ros2里面的这个spin()函数我觉的(我没有去看源代码,只是个人固执的这么认为)可以替换为如下内容: while(rclcpp::ok())
{if(timer_->call()){timer_->execute_callback();}} 这样写有一个好处,那就是不用使用智能…
ROS2开机程序自启动
运行环境
系统:Ubuntu20ROS:foxy
添加服务脚本
$ sudo vi /etc/systemd/system/rc-local.service内容如下:
[Unit]
Description/etc/rc.local Compatibility
ConditionPathExists/etc/rc.local [Service]
Typeforking
ExecStart/etc/rc…

ROS2 编写发布和订阅
创建src目录
$ mkdir ros-demo
$ cd ros-demo/
$ mkdir src
$ cd src/创建工程
$ ros2 pkg create --build-type ament_cmake cpp_pubsub配置代码提示
在ros-demo目录下新建.vscode文件夹,创建c_cpp_properties.json文件,把ros的头文件包含进来 文件…

ROS2 编写自定义消息
创建src目录
$ mkdir ros-demo
$ cd ros-demo/
$ mkdir src
$ cd src/创建工程
在src目录下执行下面的命令,生成message_interfaces文件夹,我们可以在这个文件夹内编写自己的自定义消息
$ ros2 pkg create --build-type ament_cmake message_interfac…
ros2仿真学习04 -turtlebot3实现cartographer算法建图演示
安装看这里 https://blog.csdn.net/hai411741962/article/details/135619608?spm1001.2014.3001.5502
虚拟机配置: 内存16g cpu 4 核 磁盘40G,20G 不够
启动仿真
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py启动成功如下
启动建图
重新开一个…
ROS2 Humble学习笔记
本文发表与个人的github pages。部分内容未同步到这里。 想查看完整内容,请移步到ROS2 Humble学习笔记。
一、前言
2013年的时候已经接触ROS了,当时断断续续学习了一些ROS的基础知识。16年搬到深圳之后,也有幸参加过星火的一次关于ROS的一些…
【ROS 2 Humble】 Ubuntu 20.04(Focal)平台 源码安装
提问链接: https://answers.ros.org/questions/
——————————————
ROS 1 各版本支持截止时间查看
ROS 1 支持时间查看 链接 https://wiki.ros.org/Distributions
ROS 2 各版本支持截止时间查看
ROS 2 版本支持时间查看 ROS 2
https://docs.ros.…
ROS2 高效学习系列
ROS2 高效学习系列 1 说明2 正文 1 说明
2023 年,我们总结输出了 ROS高效入门系列 和 ROS高效进阶系列,系统学习了 ros1 基础知识和 ros 的机器人算法。由于 ros2 的普及,我们将系统学习 ros2 ,包括 ros2 基础知识和相关高级组件…
ROS2中创建 Python 和 C++包
创建 Python 包 在本教程中,您将学习如何创建和设置 ROS2 Python 包。 我将向您展示每一步,并解释文件之间的关系,在哪里编写节点,如何添加启动文件等。
设置 ROS2 Python 包 Python包内文件说明 package.xml
setup.py
setup.c…
木叶飞舞之【机器人ROS2】篇章_第一节、ROS2 humble及cartorgrapher安装
ROS2的humble安装
1、系统配置ubuntu 22.04
假如长期使用ros2,建议是ubuntu系统或者双系统下安装操作,不要在虚拟机中进行。ubuntu系统能用最新的大系统就用最新的,比如22.04。等明年24.04出来可以用24.04
2、humble安装
ros版本选择humb…
ROS2 入门应用 发布和订阅(Python)
ROS2 入门应用 发布和订阅(Python)1. 创建功能包2. 创建源文件2.1. 话题发布2.2. 话题订阅3. 添加依赖关系4. 添加入口点5. 编译和运行1. 创建功能包
在《ROS2 入门应用 工作空间》中已创建和加载了ros2_ws工作空间 在《ROS2 入门应用 元功能包…

ROS2高效学习第十章 -- ros2 高级组件之大型项目中的 launch 其二
ros2 高级组件之大型项目中的 launch 1 前言和资料2 正文2.1 启动 turtlesim,生成一个 turtle ,设置背景色2.2 使用 event handler 重写上节的样例2.3 turtle_tf_mimic_rviz_launch 样例 3 总结 1 前言和资料
早在ROS2高效学习第四章 – ros2 topic 编程…
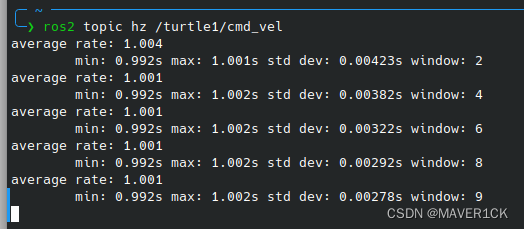
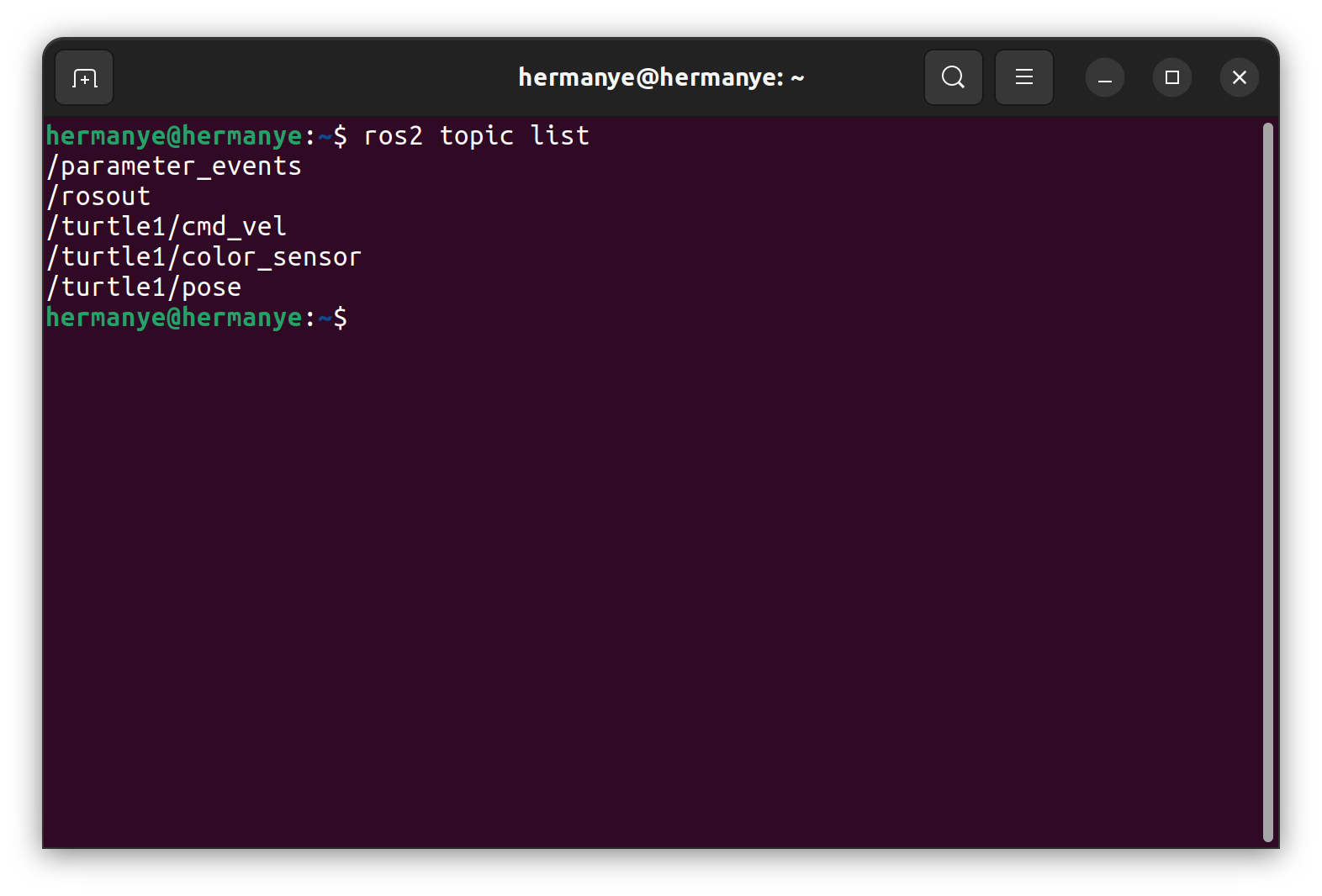
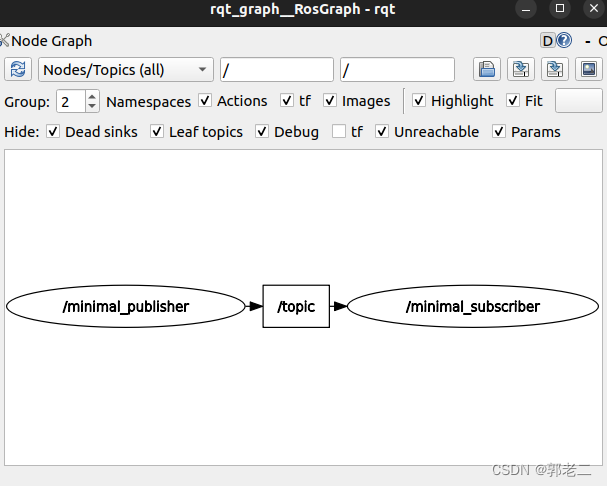
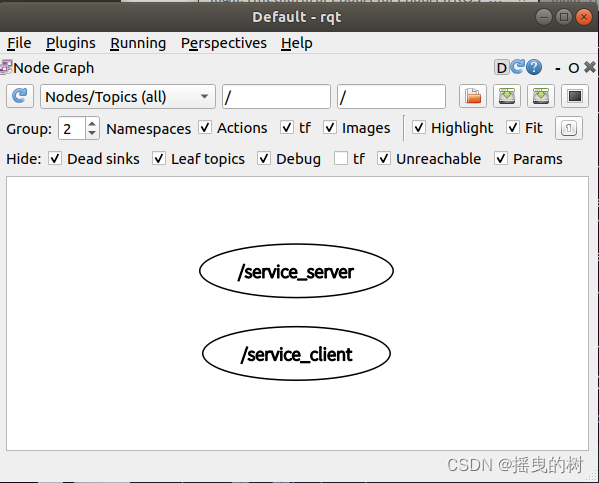
Understanding topics:理解话题(Topic)
文章目录背景1. 准备工作2. rqt_graph3. ros2 topic list 命令4. ros2 topic echo 命令5. ros2 topic info 命令6. ros2 interface show 命令7. ros2 topic pub 命令8. ros2 topic hz 命令9. 清理参考官方文档:Understanding topics
背景
ROS 2将复杂的系统分解成…
【基于Ubuntu20.04的Autoware.universe安装过程】方案二:双系统 | 详细记录 | 全过程图文 by.Akaxi
目录
一、Autoware.universe背景
Part-1:安装双系统教程
二、查看Windows引导方式
三、制作安装盘
四、设置电脑配置
1.关闭bitlocker
2.压缩硬盘分区
3.关闭Secure Boot
4.关闭intel RST
5.BIOS设置U盘引导
五、安装Ubuntu20.04
1.ventoy引导
2.安装配…
Using colcon to build packages:使用colcon来构建软件包
文章目录Colcon简介安装Colcon基本概念创建一个工作空间添加一些源文件Source底层构建工作空间运行测试Source环境尝试演示创建自己的软件包(package)设置colcon_cd和tab补全提示参考官方文档:Using colcon to build packages
这是一个关于如…

ROS2 学习(一)ROS2 简介与基本使用
参考引用 动手学 ROS2 1. ROS2 介绍与安装
1.1 ROS2 的历史
ROS(Robot Operating System,机器人操作系统),但 ROS 本身并不是一个操作系统,而是可以安装在现在已有的操作系统上(Linux、Windows、Mac&…

使用sdf文件+urdf文件模拟机器人示例(不用把urdf转sdf)
gazebo版本:harmonic;
<launch>
<group>
<let name"robot_description" value"$(command xacro $(find-pkg-share gazebo_pkg)/urdf/total.xacro)"/>
<node pkg"rviz2" exec"rviz2" name…
解决ros2缺少cv_bridge包的问题——cv_bridge源码编译安装过程
安装流程
注意:cv_bridge 依赖boost 和 opencv
首先,和编译ros2功能包一样,先创建一个工作空间
mkdir -p cv_bridge_ws/src
cd cv_bridge_ws/src然后,在src目录下,下载vision_opencv的源码,注意将-b galactic替换成…

Understanding services:理解服务(Service)
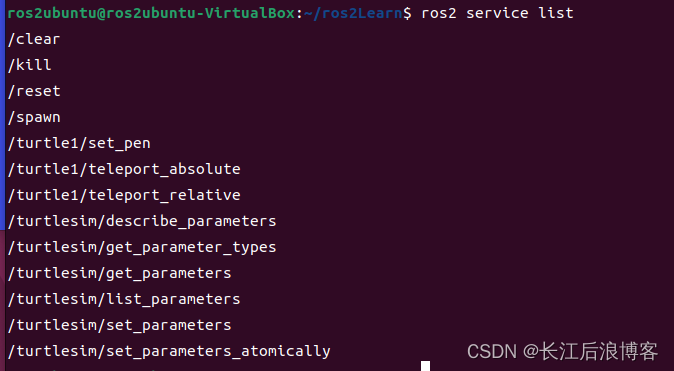
文章目录背景1. 准备工作2. ros2 service list 命令3. ros2 service type 命令3.1 ros2 service list -t 命令4. ros2 service find 命令5. ros2 interface show 命令6. ros2 service call 命令参考官方文档:
Understanding services背景
服务(Service&…
ROS2学习笔记三:话题Topic
目录
前言
1 话题简介
2 常用指令
3 RCLCPP实现实现话题
3.1 创建工作空间
3.2 代码编写
3.2.1 发布端编写
3.2.2 发布端编写 前言
ROS2中的一个重要概念是话题(Topic)。话题是一种通过发布者和订阅者之间进行异步通信的机制。发布者࿰…

ubuntu22.04桌面版系统无法识别USB摄像头
虚拟机连接电脑摄像头连接失败(驱动程序错误)
本文为转载:版权归远作者所有,之所以转载是为了避免被原作者删除 巴黎铁塔下的女孩
你尽管努力,剩下的交给时间
虚拟机调用电脑的摄像头,正常情况下只需点击…

ros2移植Apollo和autoware规控算法可跑工程
工程详细介绍请看: 自动驾驶路径规划控制ros移植Apollo和autoware规控算法可跑工程(适合入门学习,科研和实战)
ros2的工程版本说明
之所以增加ros2版本,是因为想增加代码的工程应用性,其实对于科研来说并…
机器人控制的开源优化库 Model-based Optimization for Robotics - Optimization Tools
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD 前言
开源的库和工具箱 一、开源的库和工具箱 …
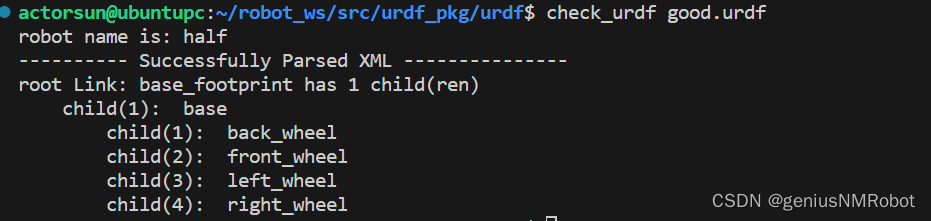
ros2/ros 4轮2驱机器人xacro/urdf文件示例代码
这个实验中最重要的是:colcon build 之后要记得source install/setup.bash.否则修改的文件是不会更新的。知道了吧 <robot name"half" xmlns:xacro"http://wiki.ros.org/wiki/xacro"><xacro:property name"PI" value"3…

esp-01刷固件/下载软件到内部单片机的方法
此文章为转载,非原创 一、准备 需要准备三个东西: 1.esp模块。ESP-01 和 ESP-01s 的引脚及 flash 容量基本完全兼容,只是内部硬件设计粗糙与否的区别,所以理论上都适用。 2.官方固件。此部分可以从安信可官方教程中下载࿰…
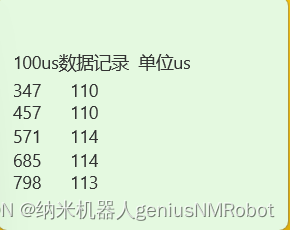
stm32超声波测距不准的解决方法(STM32 delay_us()产生1us)
首先要说明一下原理:使用stm32无法准确产生1us的时间,但是超声波测距一定要依赖时间,时间不准,距离一定不准,这是要肯定的,但是在不准确的情况下,要测量一个比较准确的时间,那么只能…
MATLAB - Gazebo 联合仿真 —— 使用 UR10 机械臂检测和采摘水果
系列文章目录 文章目录 系列文章目录前言一、设置 Gazebo 仿真环境二、在 Gazebo 中模拟和控制机器人2.1 概述2.2 任务调度器2.3 感知和目标生成系统2.4 运动规划2.5 机械臂和关节控制系统 三、分配用于控制机器人的参数3.1 定义机器人模型和运动规划参数,3.2 定义机…

ROS2 入门应用 创建启动文件(Python)
ROS2 入门应用 创建启动文件(Python) 1. 创建功能包2. 添加依赖关系3. 添加启动文件4. 创建启动文件4.1. Python4.2. XML4.3. YAML 5. 编译和运行 1. 创建功能包
用Python、XML或YAML编写的启动文件可以启动和停止不同的节点,以及触发和处理…
![[ROS2] --- topic](https://img-blog.csdnimg.cn/direct/206646109894487c85af0e074ed12b2d.png)
[ROS2] --- topic
1 topic通信机制
1.1 发布/订阅模型
Topic通信模型是一种发布订阅模型,ROS2使用了基于DDS的发布/订阅模型,数据传输过程如下图: 话题数据传输的特性是从一个节点到另外一个节点,发送数据的对象称之为发布者,接收数据…
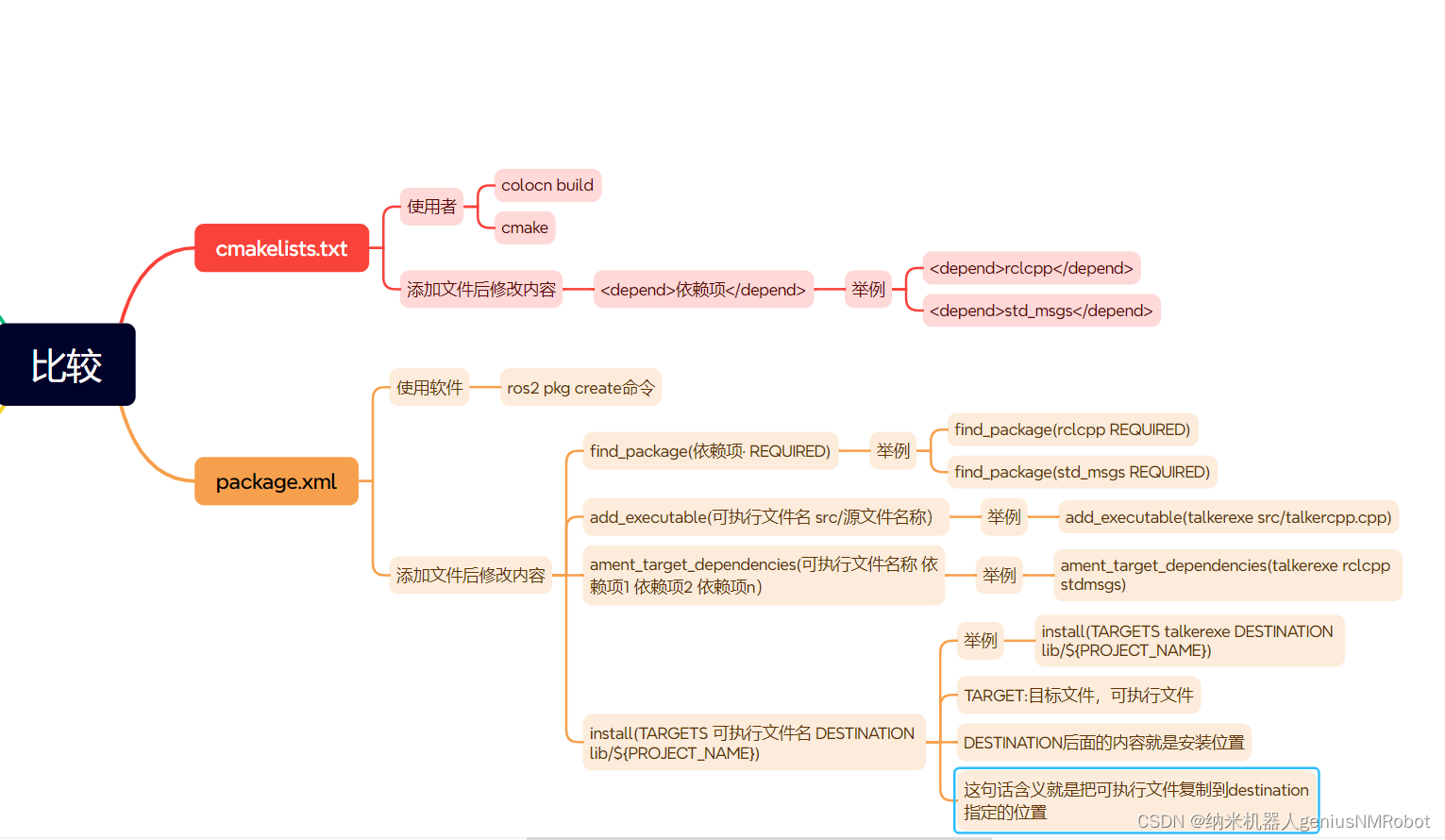
ros2文件package.xml与cmakelists.txt比较
每次在ros2里面添加文件以后,都要修改packages.xml,与cmakelists.txt文件。
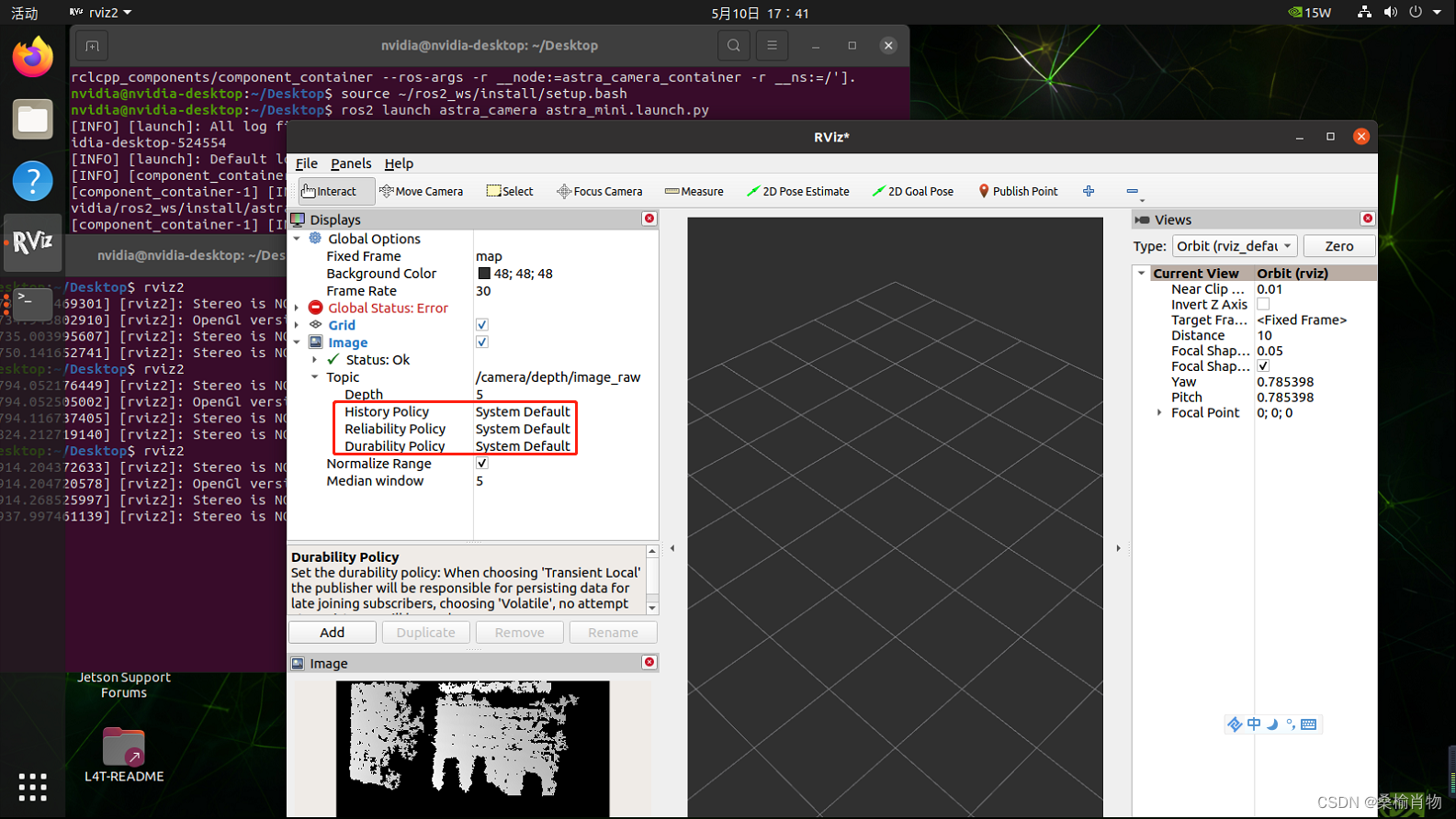
ROS2 中 使用奥比中光 Orbbec Astra Pro 深度相机
本文将以 Ubuntu 20.04 和 ROS2 foxy 环境为例,详细介绍如何在 ROS2 中使用奥比中光 Orbbec Astra Pro 深度相机。在这一篇文章中,你会学到如何创建工作空间,使用 usb_cam 功能包,编译安装使用 ros_astra_camera 等。 文章目录 1.…
ros2机器人上位机与下位机连接方式(转载)
从硬件连接、通信协议和软件设计开发,上位机如何控制下位机?
由你创科技2023-09-07 10:38广东
随着科技的不断发展,自动化控制系统已经广泛应用于各个行业。在自动化控制系统中,上位机和下位机是两个重要的组成部分。上位机主要…
ros2不同版本的差异 foxy galactic humble rolling
ros2不同版本的差异 foxy galactic humble rolling
ROS2的每个版本都有其特点和改进。以下是关于Foxy, Galactic, Humble和Rolling版本的一些关键差异:
Foxy Fitzroy (2020-06-05)
针对LTS(长期支持)版本,支持时间为3年。 引入…
ros2自己创建message
0.前言
ros2查看message信息的命令是ros2 interface show yourmessage,查看服务也类似
1.流程
ros2 pkg create --build-type ament_cmake tutorial_interfacescd tutorial_interfacesmkdir msgcd msgvim xx.msg,内容
geometry_msgs/Point point在CM…
ROS2机器人编程简述humble-第四章-AN OBSTACLE DETECTOR THAT USES TF2 .1
如何检测一个障碍物呢?视觉、雷达?可视化效果如何?机器人所装备的传感器例如感知设备,主要负责环境的获取和识别。然后,结果发送给电机控制运动,在环境中自主、智能决策和规划。需要先简单看一下仿真可视化…

ros2 服务——ubuntu20.04——自定义数据类型
文章目录 自定义一个服务数据类型接口创建sev目录和文件修改包的CMakeLists.txt文件修改包的package.xml文件查看是否成功 服务全部代码 自定义一个服务数据类型接口
创建sev目录和文件
服务的接口类型由两部分组成,请求和相应
在包的src的同级目录下创建sev文件…
ros2+gazebo+urdf:ros2机器人使用gazebo的urdf文件中的<gazebo>部分官网资料
原文链接SDFormat extensions to URDF (the gazebo tag) — Documentation
注意了ros2的gazebo部分已经跟ros1的gazebo部分不一样了: Toggle navigation SpecificationAPIDocumentationDownload
Back
Edit Version: 1.6 Table of C…
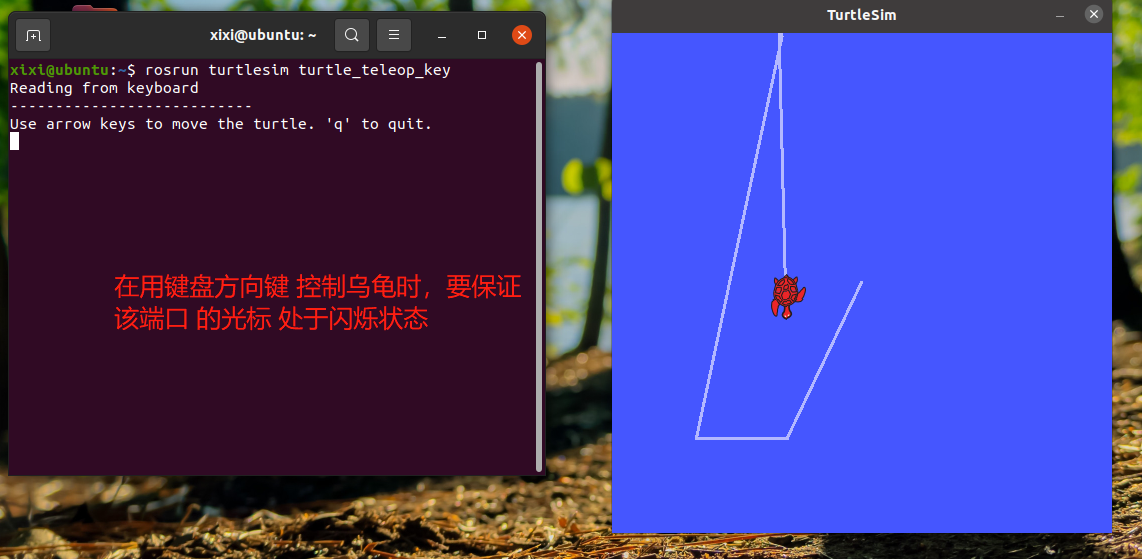
使用 Python、XML 和 YAML 编写 ROS 2 Launch 文件
系列文章目录 文章目录 系列文章目录前言一、Launch 文件示例1.1 Python 版本1.2 XML 版本1.3 YAML 版本 二、从命令行使用 Launch 文件1. Launching2. 设置参数3. 控制海龟 三、Python、XML 或 YAML: 我应该使用哪种语言?如果觉得内容不错,请…

Robot Operating System 2: Design, Architecture, and Uses In The Wild
Robot Operating System 2: Design, Architecture, and Uses In The Wild (机器人操作系统 2:设计、架构和实际应用) 摘要:随着机器人在广泛的商业用例中的部署,机器人革命的下一章正在顺利进行。即使在无数的应用程序和环境中,也…
![[ROS2] --- 手动编写一个节点](https://img-blog.csdnimg.cn/direct/e347903039954c7baa043114fbc28ec1.png)
[ROS2] --- 手动编写一个节点
1 准备工作
1.1 创建/编译工作空间
创建工作空间
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src1. 2 创建功能包
ros2 pkg create learning01_write_a_node --build-type ament_cmake --dependencies rclcpp可以看到目录结构如下:
1. 3 创建节点
在learing01_write…

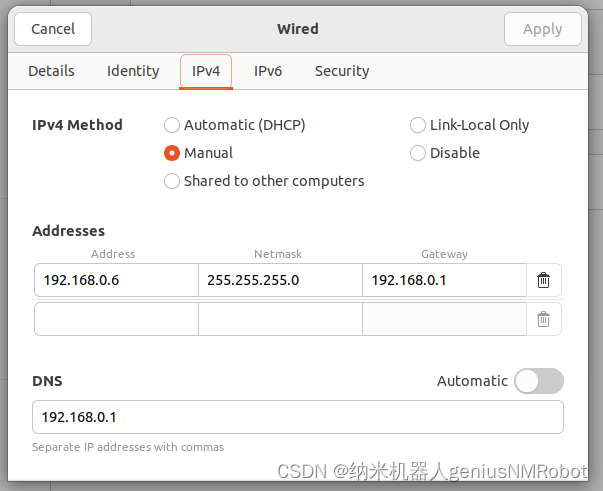
ros2不同机器通讯时IP设置
看到这就是不同机器的IP地址,为了避免在路由器为不同的机器使用DHCP分配到上面的地址,可以设置DHCP分配的范围:(我的路由器是如下设置的,一般路由器型号都不一样,自己找一下)
防火墙设置-----&…
ROS2的cv_bridge库opencv版本不匹配问题
1. 问题
/usr/bin/ld: warning: libopencv_imgcodecs.so.4.2, needed by /opt/ros/foxy/lib/libcv_bridge.so, may conflict with libopencv_imgcodecs.so.4.5/usr/bin/ld: warning: libopencv_core.so.4.2, needed by /opt/ros/foxy/lib/libcv_bridge.so, may conflict with …
【ros/ros2】ros1迁移到ros2的修改记录
文章目录 序言1. 要改哪些内容2. 详细对比修改2.1 CMakeLists.txt2.2 packge.xml2.3 launch文件2.4 代码修改:头文件2.5 代码修改:subscriber/publisher2.6 代码修改:主程序2.7 代码修改:类的使用2.8 代码修改:生命周期…
【ROS2】ROS2使用C++实现简单服务端
使用ROS2实现简单的服务端,功能为将客户端提供的两个数相加后返回给客户端。
代码如下:
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
#include "base_interfaces_demo/msg/student.hpp"
#include "base_interfac…
ros2 基础学习16 - RQT:模块化可视化工具
RQT:模块化可视化工具 ROS中的Rviz功能已经很强大了,不过有些场景下,我们可能更需要一些简单的模块化的可视化工具,比如只显示一个摄像头的图像,使用Rviz的话,难免会觉得操作有点麻烦。 此时,我…
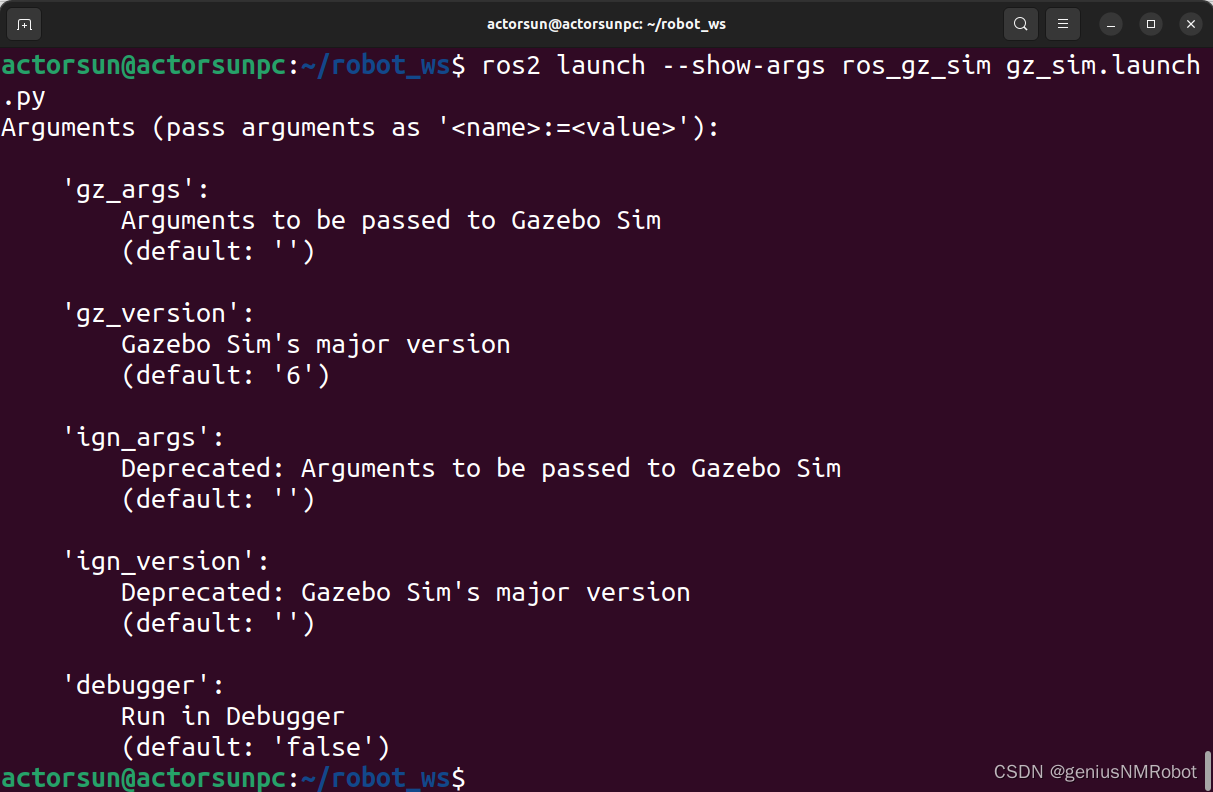
ros2查看launch文件内需要提供的参数(接口):
格式:ros2 launch --show-args 包名称 launch文件名称
例如:
ros2 launch --show-args ros_gz_sim gz_sim.python.py
rosnode ping指令
节点是一个可执行文件,它可以通过ROS来与其他节点进行通信(这些节点可以分布在不同设备上面的软件直接,例如一台在Windows上面,一台在Ubuntu,一台在stm32上面)
节点是ROS中非常重要的一个概念,为了帮助初学者理解这个…
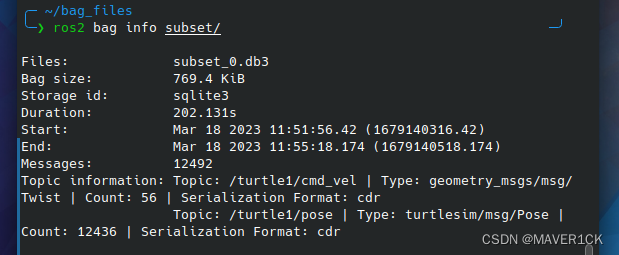
Recording and playing back data:录制和播放数据
文章目录ros2 bag 命令简介1. 准备环境2. 选择一个话题3. ros2 bag record 命令3.1 记录多个话题4. ros2 bag info 命令5. ros2 bag play 命令参考官方文档:
Recording and playing back dataros2 bag 命令简介
ros2 bag 是一个命令行工具,用于记录在你…
【ROS】ROS2编程示例:话题订阅-发布-C++版
1、准备
1)安装ROS2 【ROS】Ubuntu22.04安装ROS2(Humble Hawksbill)
2)ROS2命令 【ROS】ROS2命令行工具详解
3)配置工作空间 【ROS】ROS2中的概念和名词解释中第一节:工作空间 workspace
4)…
ubuntu18 + ros2 eloquent +python3.6
卸载 sudo systemctl stop ros2-eloquent-* #输入以下命令以停止所有ROS 2 Eloquent相关的进程 sudo apt remove ros-eloquent-* #输入以下命令以卸载ROS 2 Eloquent软件包 ls /etc/ros/ ls /opt/ros/ sudo rm -rf /opt/ros/eloquent#输入以下命令以删除ROS 2 Eloquent的配置文…

ros2+在Ubuntu上安装gazebo
Binary Installation on Ubuntu(Ubuntu上binary方式安装gazebo)
Harmonic binaries are provided for Ubuntu Jammy (22.04) and Ubuntu 24.04 (when its released). (在Ubuntu22.04或者24.04上都是安装Harmonic版本的gazebo)The Harmonic binaries are…
ROS2 入门应用 发布和订阅(C++)
ROS2 入门应用 发布和订阅(C)1. 创建功能包2. 创建源文件2.1. 话题发布2.2. 话题订阅3. 添加依赖关系4. 添加编译信息4.1. 添加搜索库4.2. 增加可执行文件4.3. 增加可执行文件位置5. 编译和运行1. 创建功能包
在《ROS2 入门应用 工作空间》中已创建和加…
ROS2-humble SetuptoolsDeprecationWarning: setup.py install is deprecated
新换了操作系统,从ubuntu20.04升级到22.04,使用ROS2 humble,编译的时候总是报这个错误,
c:\python38\lib\site-packages\setuptools\_distutils\cmd.py:66: SetuptoolsDeprecationWarning: setup.py install is deprecated. !! *…
ubuntu环境上搭建ros2
环境搭建
设置系统区域。
首先需要确保安装环境支持 UTF-8 格式
sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALLen_US.UTF-8 LANGen_US.UTF-8
export LANGen_US.UTF-8
locale添加 ROS2 的代码仓库
设置你的sources.list࿰…

香橙派3LTS部署ROS2阿克曼开源平台
1.系统镜像下载 这里我们需要安装ROS2的humble版本,需要ubuntu 22.04版本的系统。 香橙派镜像下载:http://www.orangepi.cn/html/hardWare/computerAndMicrocontrollers/service-and-support/Orange-Pi-3-LTS.html 点击Ubuntu镜像,选择jamm…
安装compiler version 5
这个compiler version5 在我的资源里面可以免费下载;
另外这个东西还需要安装,安装教程在这里:Keil最新版保姆教程(解决缺少V5编译器问题) - 哔哩哔哩 (bilibili.com) 看吧安装好了year

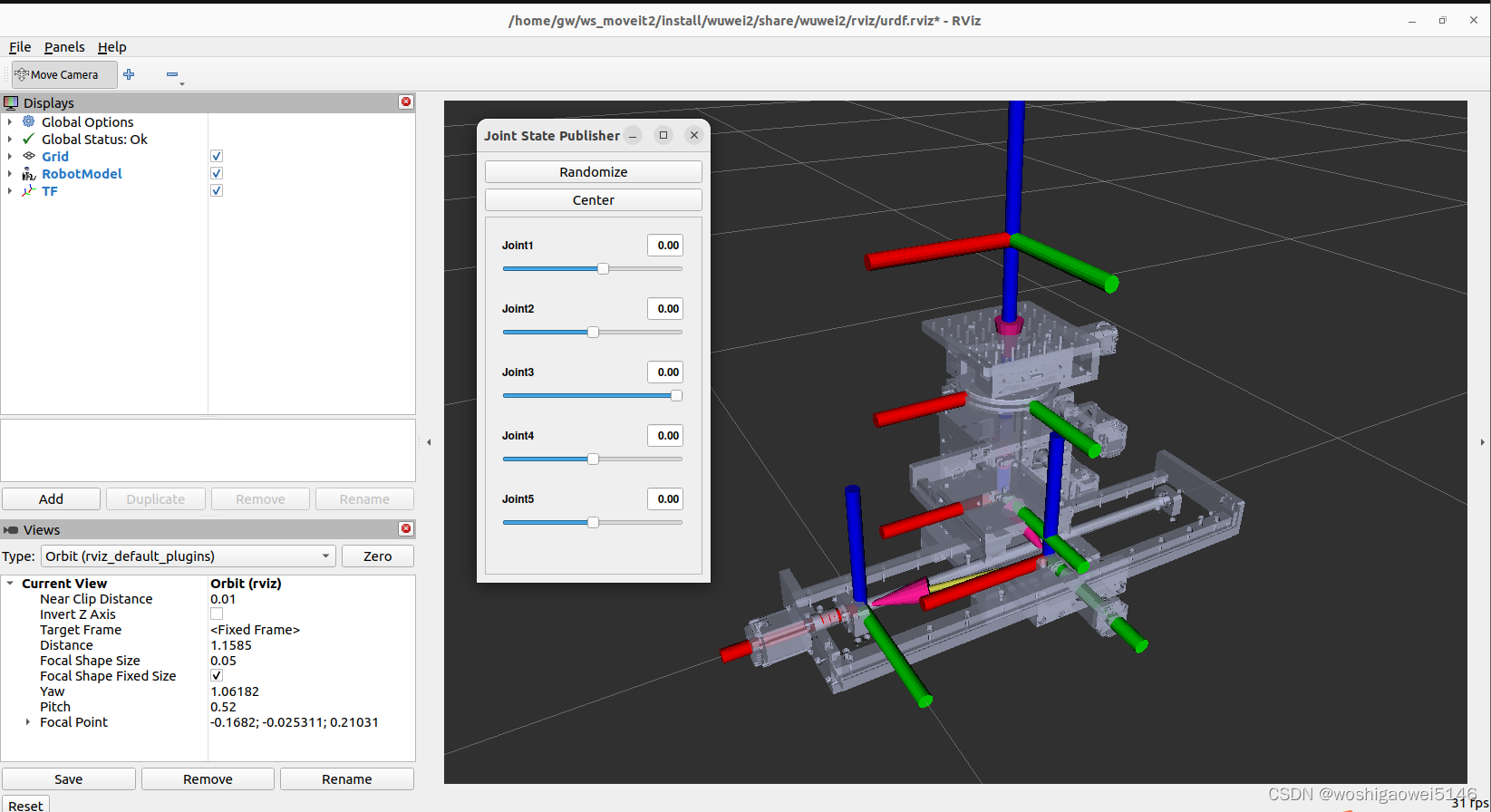
Solidworks导出URDF总结(Humble)
环境
Solidwoks2021 SP5;Ubuntu22.04;ROS2 Humble;
步骤
基本步骤参考:Solidworks导出URDF总结(Noetic) 本文只介绍不同之处。
将solidworks生成的文件夹(我这里为wuwei2)移动到/ws_moveit2…
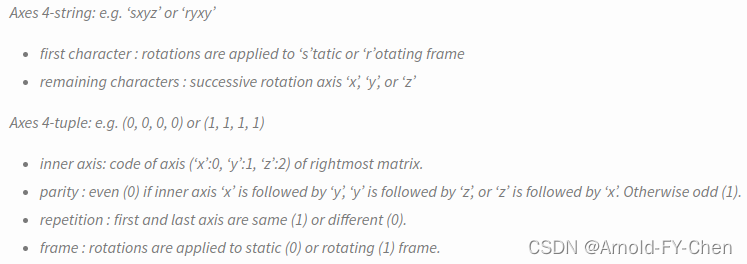
ROS2中如何从欧拉角转换成四元素
ROS1中使用from tf.transformations import quaternion_from_euler导入quaternion_from_euler()即可调用。而ROS2中默认没有安装,需要单独安装一下ros-galactic-tf-transformations(我使用的ROS2是galactic,根据版本名不同做相应修改即可):
…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机进入Offboard模式起飞悬停并在Gazebo中可视化
在Simulink中使用ROS2控制无人机进入Offboard模式起飞悬停并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现…
【ROS2】MOMO的鱼香ROS2(四)ROS2入门篇——ROS2节点通信之话题与服务
ROS2节点通信之话题与服务点 引言1 理解从通信开始1.1 TCP(传输控制协议)1.2 UDP(用户数据报协议)1.3 基于共享内存的IPC方式 2 ROS2话题2.1 ROS2话题指令2.2 话题之RCLPY实现2.2.1 编写发布者2.2 2 编写订阅者2.2.3 运行测试 3 R…
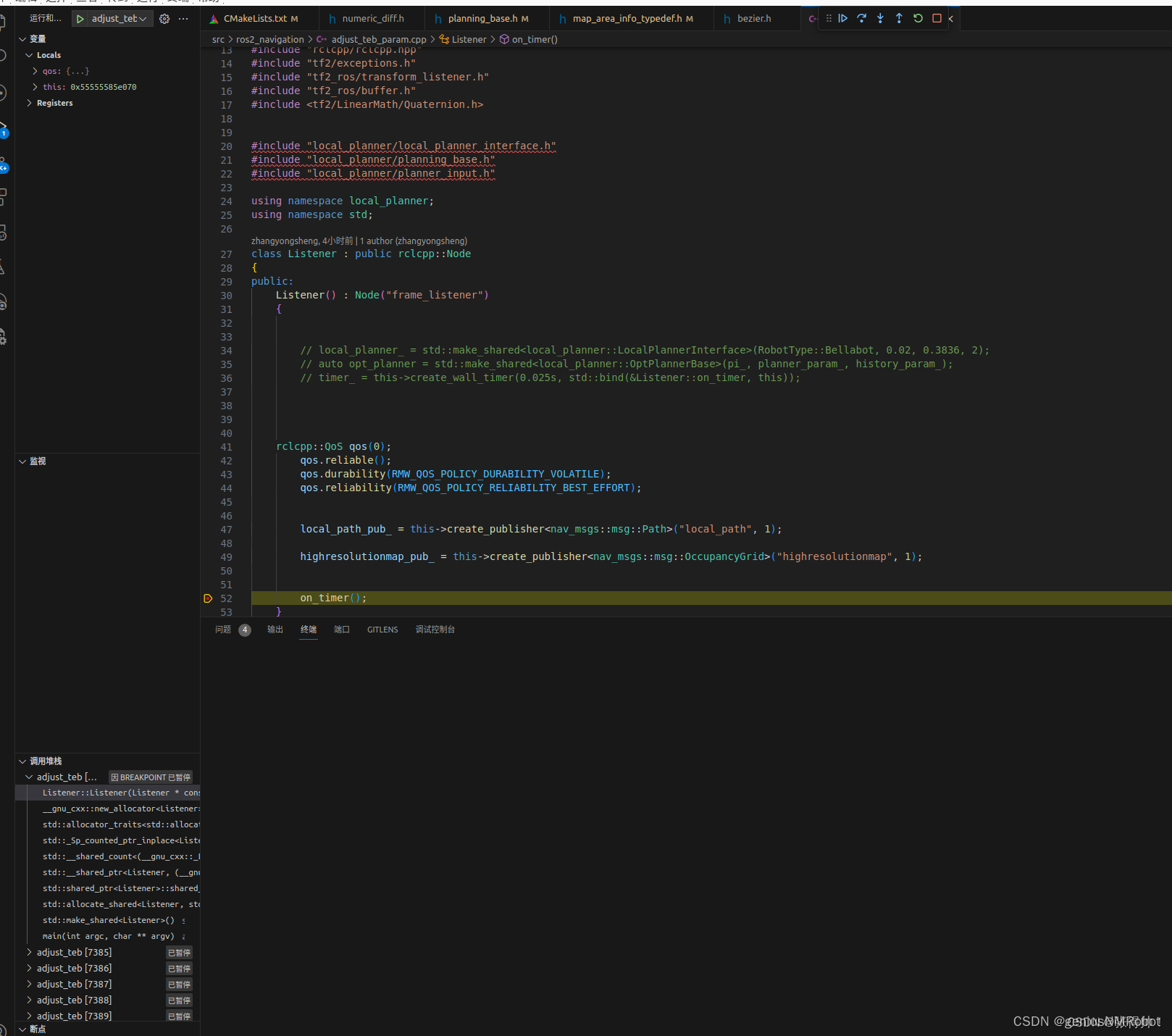
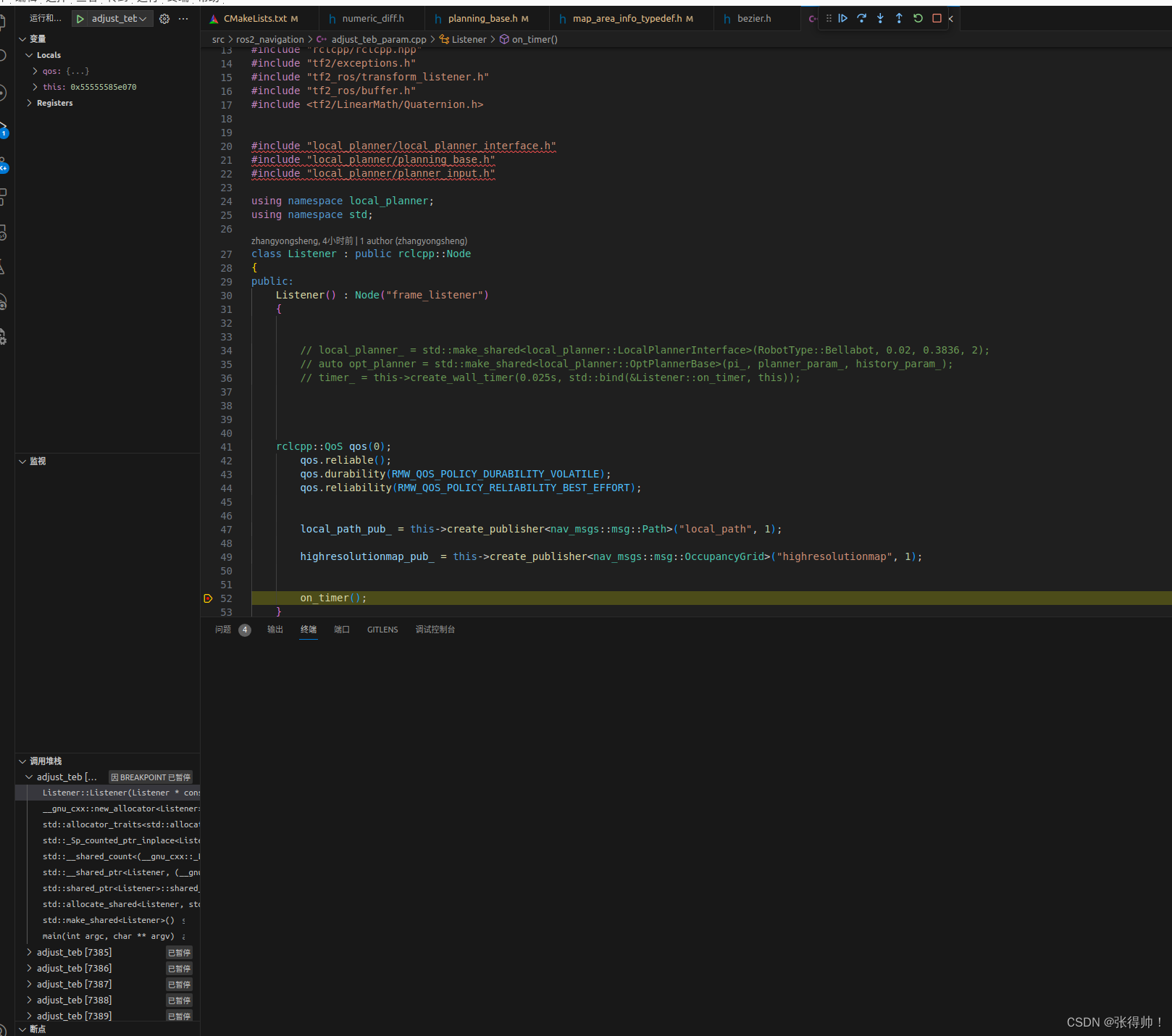
使用VSCODE 调试ros2具体设置
vscode 调试 ROS2
张得帅!
于 2023-09-09 15:39:39 发布
456 收藏 1 文章标签: vscode ros2 版权 1、在下列目录同层级找到.vscode文件夹 . ├── build ├── install ├── log └── src 2、 安装ros插件 3、创建tasks.json文件,添…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现原理…
虚拟机vmware使用桥接方式联网设置
步骤:虚拟机设置----》网络适配器---->桥接模式 这样设置好;只是这样设置是无法联网的
现在进入到虚拟机内部----->电机右上角的”网络连接“(wired connection)(没错就是wired connection 虽然是连接WiFi热点但…

利用ros实现单片机通讯(转载)
我觉得如果使用这个人的micro_ros通信协议,就不用再去Ubuntu或者Windows上面自己写驱动程序了, 利用micro_ros实现esp32与ros2的通讯 Tianci
天津大学 工学博士
参考:https://github.com/micro-ROS/micro_ros_arduino
https://blog.cs…
远离危险的购买手机的渠道
今年上半年从淘宝特价版上面的官方旗舰店买了一个oppo手机,第一次买我打算不要了,所以就退了回去,过了几天我又觉得还是买一个比较好,所以就又买了一个,型号我绝不说了700-1000z这个价位的手机带个高通骁龙芯片的&…
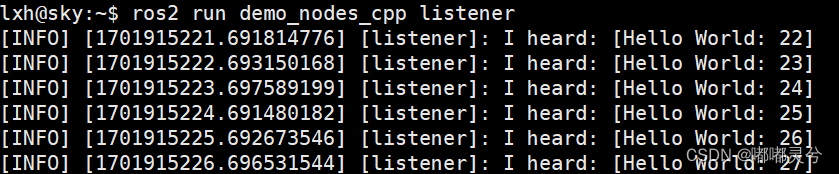
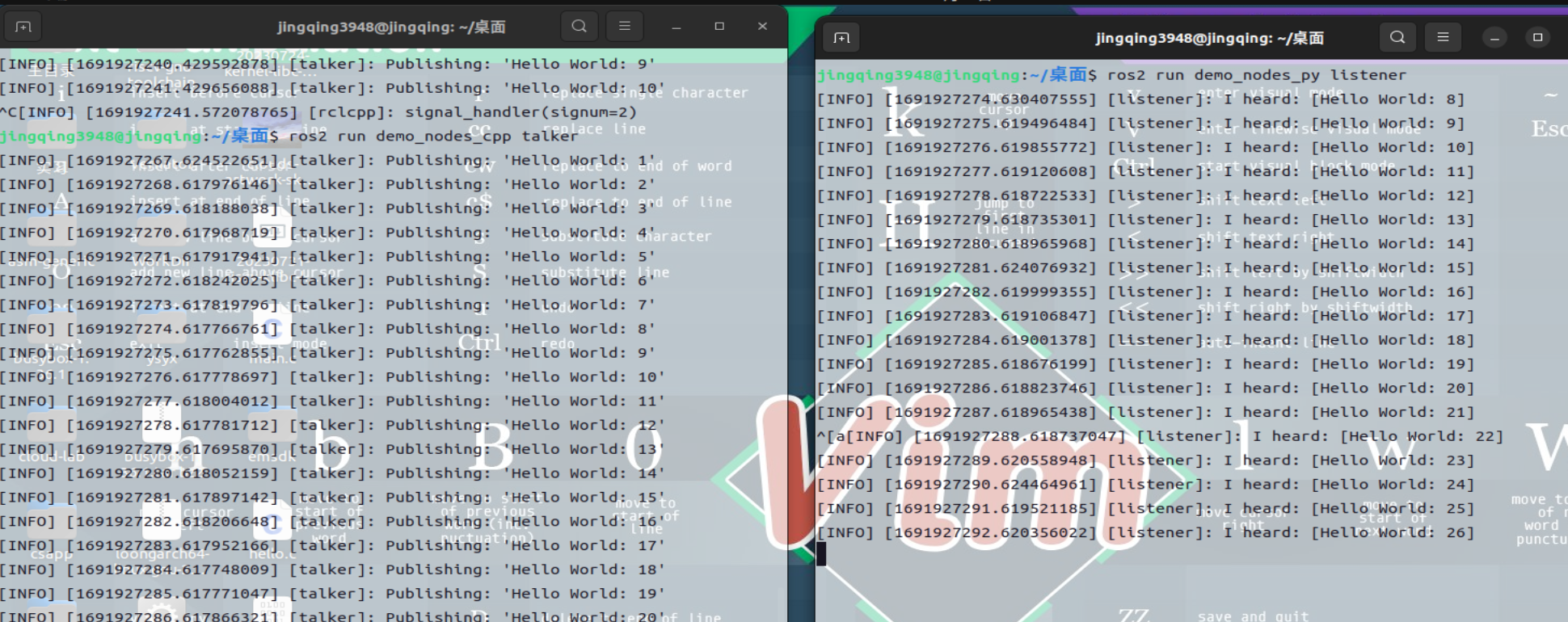
ROS2学习笔记一:安装及测试
目录
前言
1 ROS2安装与卸载
1.1 安装虚拟机 1.2 ROS2 humble安装
2 ROS2测试
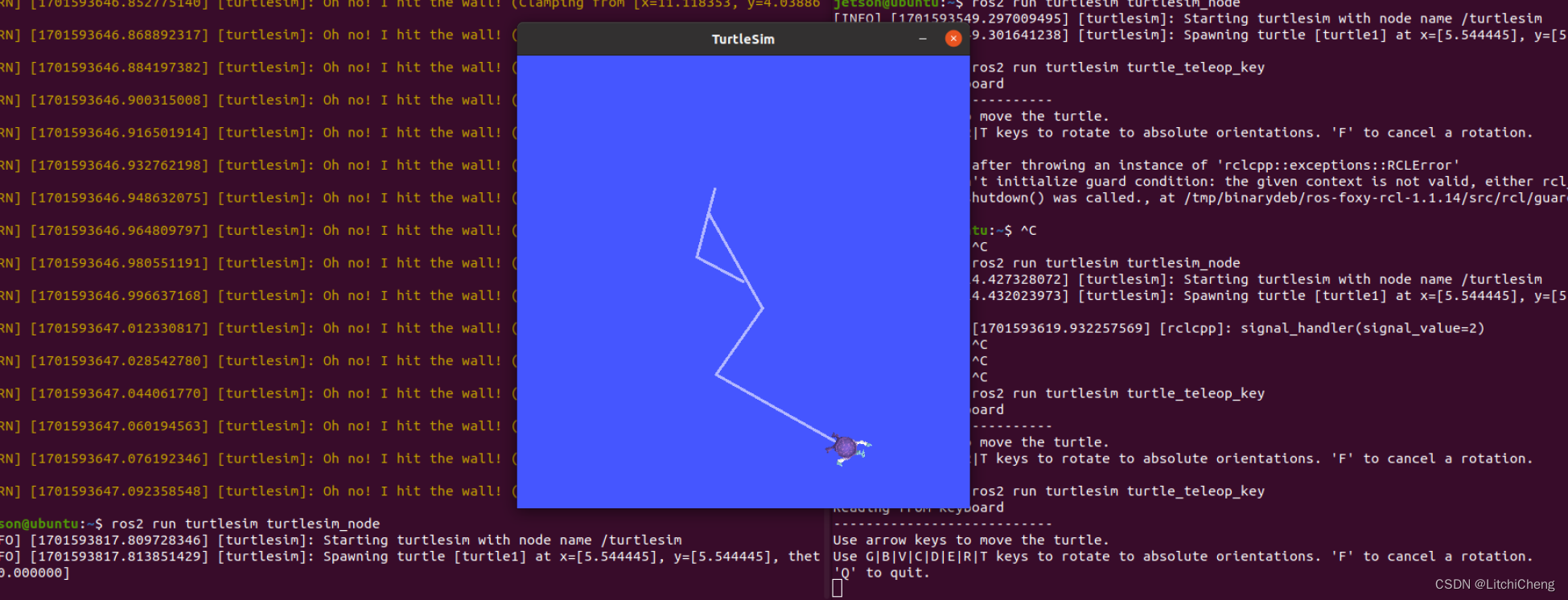
2.1 topic测试
2.2 小海龟测试
2.3 RQT可视化
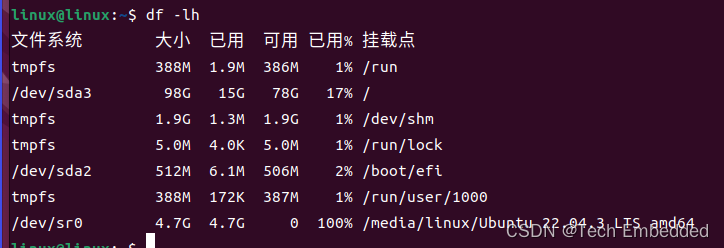
2.4 占用空间 前言
ROS2的前身是ROS,ROS即机器人操作系统(Robot Operating System),ROS为了“提高机器人…
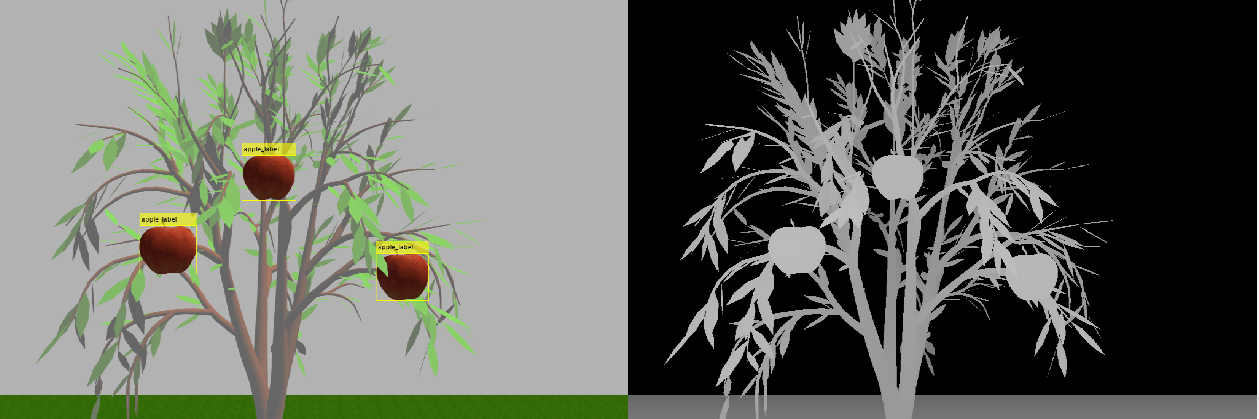
ros2内结合gazebo和rviz进行yolov8检测记录
前提:第一次接触ros2, 遇到的问题解决方式不一定准确,只是这次我尝试成功了,想和大家分享一下。
ubuntu20.04系统
目录
1. ros2
1.1 ros2是啥?
1.2 ros2的版本和ubuntu版本的对应关系,当下入门尤其是ubuntu20.04系…
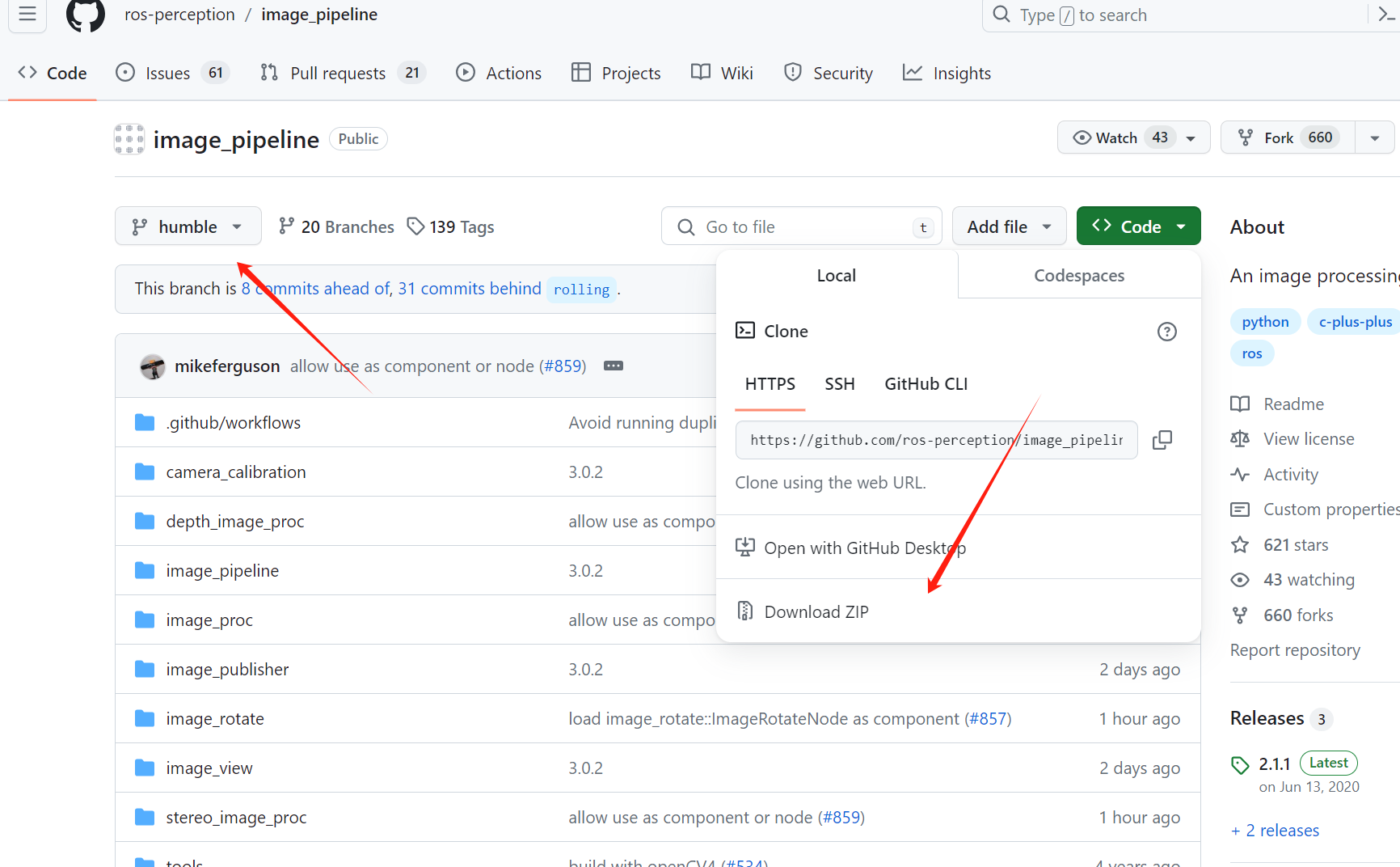
Ubuntu2204+ROS2(humble)+usb_cam内参标定
1、安装usb_cam包
sudo apt install ros-humble-usb-cam# 测试打开相机
ros2 launch usb_cam camera.launch.py# 显示图像
ros2 run image_view image_view image:/camera1/image_raw
2、安装 camera_calibration
sudo apt install ros-humble-camera-calibration
3、执行标…
【ROS】Ubuntu22.04安装ROS2(Humble Hawksbill)
0、版本说明
Ubuntu22.04对应的ROS2的版本为Humble Hawksbill(ros-humble) 如果不是在Ubuntu22.04中安装ROS,请参考下面Ubuntu和ROS的版本对应关系
1、更新apt包列表
$ sudo apt update2、设置编码
将ubuntu环境语言编码设置为en_US en_…
gazebo harmonic版本设置自定义sdf文件
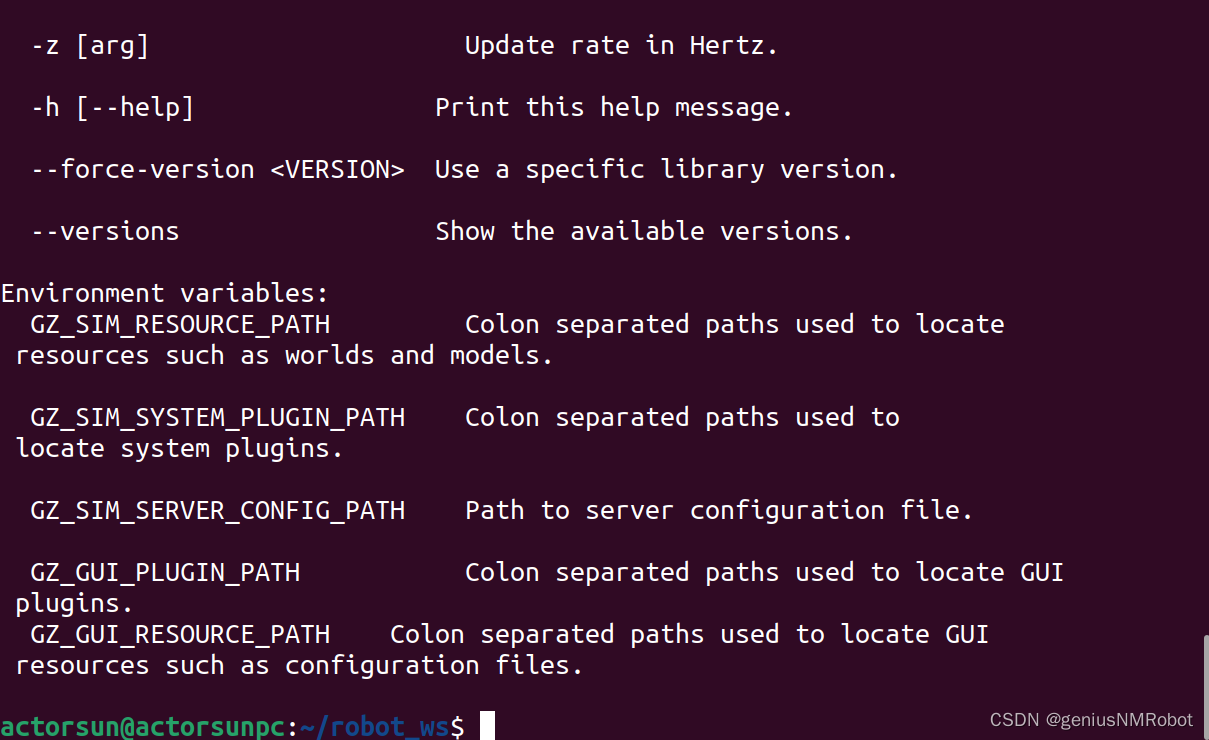
首先要设置环境变量GZ_SIM_RESOURCE_PATH 为sdf文件存放路径,
然后在include文件中使用上图方式就可以了 输入gz sim -h获取帮助
还有一个很重要的地方要说明:要直接使用gazebo软件一次性保存到指定文件夹,如果先放在文件夹A,然…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…
ROS2 与 Gazebo 联合仿真项目模版
系列文章目录 文章目录 系列文章目录前言一、包含的软件包二、安装2.1 安装要求2.2 作为模板使用 三、用法3.1 安装依赖项3.2 构建项目3.3 source 工作空间3.4 启动仿真 四、详细用法4.1 软件包结构4.2 仿真资源配置 总结 前言
一个集成了 ROS 2 和 Gazebo 模拟器的模板项目。…
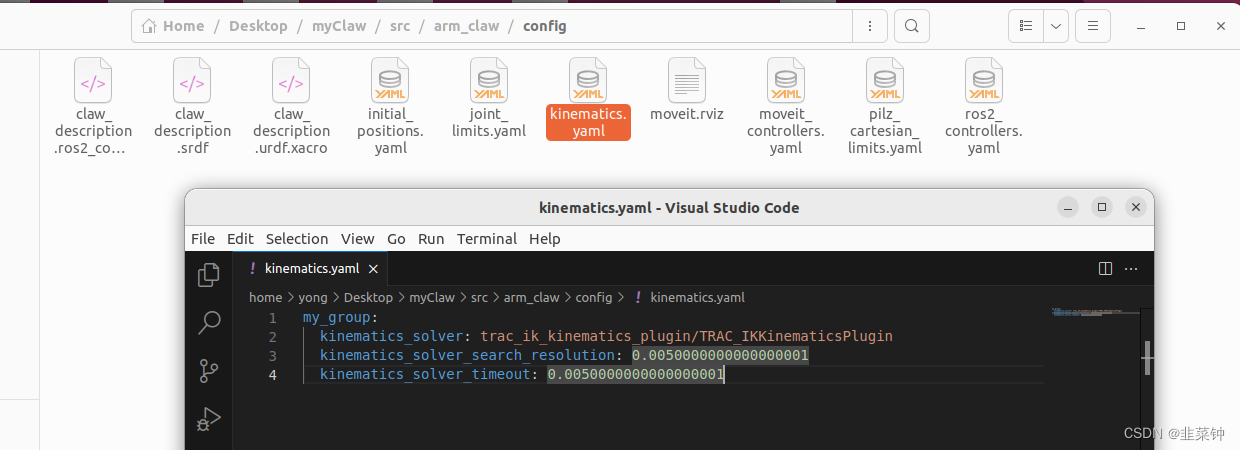
MoveIt2中使用trac_ik
文章目录 1.下载trac_ik的源码2.安装 NLopt library3.编译源码4.使用 在ros1moveit1中,使用trac_ik是很简单的一件事情:【TRAC-IK Kinematics Solver】 但是在Ros2中,无论MoveIt2也好,还是trac_ik也好,都没有提供标准的…
ros2学习笔记-CLI工具,记录命令对应操作。
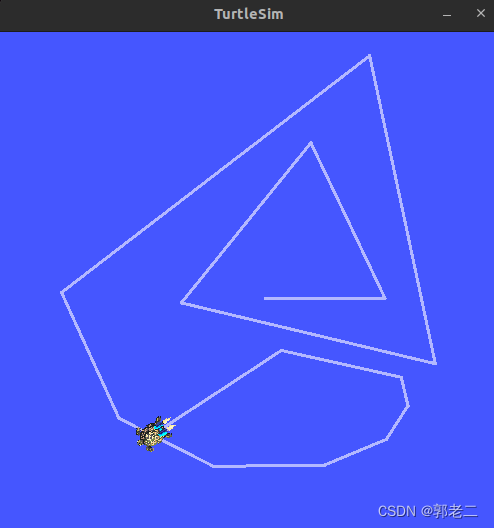
目录 环境变量turtlesim和rqt以初始状态打开rqt node启动节点查看节点列表查看节点更多信息命令行参数 --ros-args topic话题列表话题类型话题列表,附加话题类型根据类型查找话题名查看话题发布的数据查看话题的详细信息查看类型的详细信息给话题发布消息࿰…
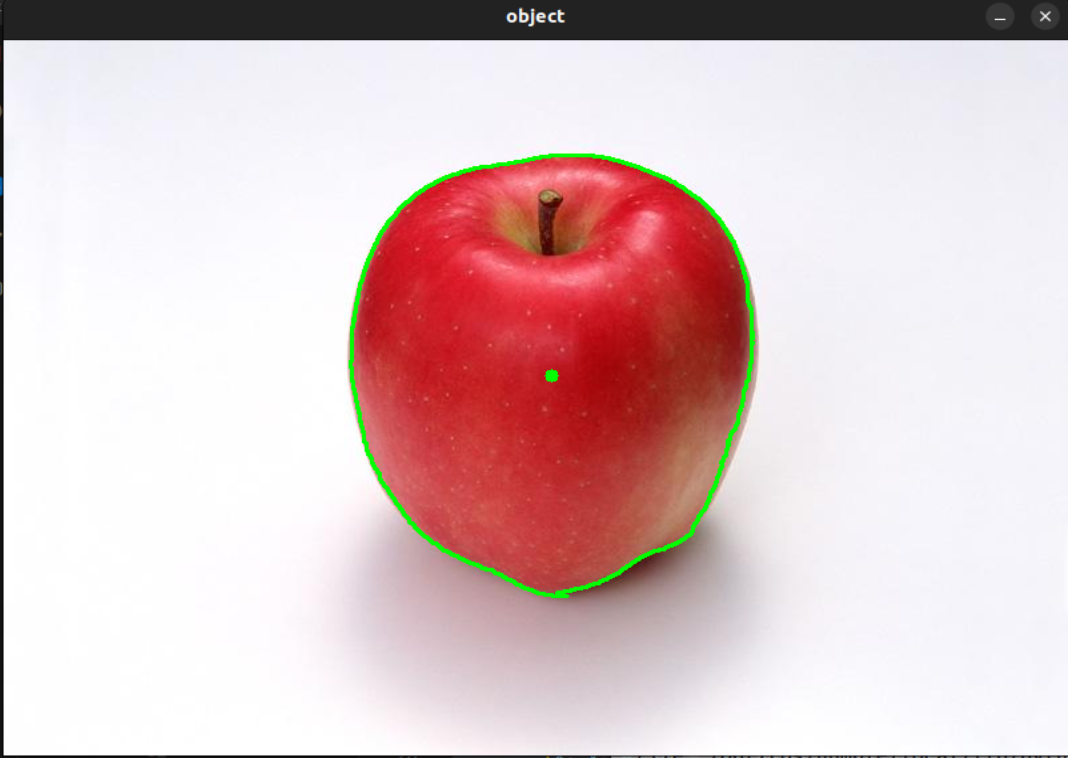
opencv差值法检测移动物体代码
void CrelaxMyFriendDlg::OnBnClickedOk()
{hdc this->GetDC()->GetSafeHdc();// TODO: 在此添加控件通知处理程序代码string addrImg "c:/Users/actorsun/Pictures/";string addrVideo "c:/Users/actorsun/Videos/";string addr addrVideo &qu…
nav02 学习03 机器人传感器
机器人传感器 移动机器人配备了大量传感器,使它们能够看到和感知周围的环境。这些传感器获取的信息可用于构建和维护环境地图、在地图上定位机器人以及查看环境中的障碍物。这些任务对于能够安全有效地在动态环境中导航机器人至关重要。 机器人的传感器类似人的感官…
怎样给Ubuntu系统安装vmware-tools
首先我要告诉你:Ubuntu无法安装vmware-tools,之所以这么些是因为我一开始也是这样认为的,vmware-tools是给Windows系统准备的我认为,毕竟Windows占有率远远高于Linux,这也可以理解。 那么怎么样实现Ubuntu虚拟机跟Wind…
ROS2学习(七) Foxy版本ros2替换中间件。
在ros2使用的过程中,一开始选用的foxy版本,后来发现,foxy版本的ros2有很多问题。一个是foxy版本已经停止维护了。另一个问题是这个版本有很多bug, 后续的版本在功能实现上做了很大的改动,甚至说进行了重写。修复的一些问题&#x…


micro_ros_setup包镜像及部分注释(我觉得此包支持很有限)
GitHub - micro-ROS/micro_ros_setup at humble
README.md This ROS 2 package(这是一个包) is the entry point for building micro-ROS apps for different embedded platforms.
Supported platforms Standalone build system toolsDependenciesQuick startBuilding Creati…
Navigation 2 学习02 nav2 行为树概念
行为树定义: 行为树(BT)在复杂的机器人任务中变得越来越普遍。它们是要完成的任务的树形结构。它创建了一个更具可扩展性和人类可理解性的框架,用于定义多步骤或多状态应用程序。这与有限状态机(FSM)相反&a…
Gazebo 从 Ignition 迁移指南
系列文章目录 文章目录 系列文章目录前言一、概览1.1 变化1.2 Tick-tocks and Hard-tocks1.3 Tick-tocks1.3.1 Namespaces(命名空间)1.3.2 Source(源文件)1.3.3 CMake and Packaging(CMake 和打包)1.3.4 Mi…
【基于Ubuntu20.04的Autoware.universe安装过程】方案一:虚拟机 | 详细记录 | Vmware | 全过程图文 by.Akaxi
目录
一、Autoware.universe背景
二、虚拟机配置
三、Ubuntu20.04安装
四、GPU显卡安装
五、ROS2-Galactic安装
六、ROS2-dev-tools安装
七、rmw-implementation安装
八、pacmod安装
九、autoware-core安装
十、autoware universe dependencies安装
十一、安装pre-c…
【手把手做ROS2机器人系统开发二】熟悉ROS2基本命令
【手把手做ROS2机器人系统开发二】熟悉ROS2基本命令 一、上讲回顾 在上一讲开发环境搭建中,我们讲解了如何搭建Ubuntu系统环境和ROS2开发运行环境。
1.Ubuntu系统安装
2.ROS2系统环境安装 二、ROS2核心命令讲解
1、daemon-各种守护进程相关的子命令
查看帮助&am…
ROS2学习(一):Ubuntu 22.04 安装 ROS2(Iron Irwini)
文章目录 一、ROS2(Iron Irwini)介绍二、ROS2(Iron Irwini)安装1.设置编码2.使能代码库3.安装ROS2 Iron 三、ROS2测试四、ROS2卸载 一、ROS2(Iron Irwini)介绍
官方文档 Iron Irwini版本支持的平台如下:
二、ROS2(Iron Irwini)安装
1.设置编码
sudo apt update…
ros2_launch启动文件——python实现
文章目录 launch启动文件 launch启动文件
包目录中src,srv文件夹的同级目录中创建launch文件夹,我们的launch文件就放在launch文件夹里面创建Python启动文件,文件名命名都是xxx_launch.py的形式 3 编写python的程序
# 导入launch启动文件所…
【环境搭建】ubuntu22安装ros2
基于某种特殊需求,从Ubuntu16到22目前都尝试过安装ros、ros2 参考1:http://t.csdnimg.cn/DzvSe 参考2:http://t.csdnimg.cn/sOzr1
1.设置locale
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
s…
ROS2(Cpp或Python)机器学习路径选择三维模拟平衡车及YOLOv8视觉消息
要点 机器人运动几何和运动学,Python短代码简述 ROS2创建包,使用C和Python创建以下任务:创建发布者和订阅者并使用CMake编译,创建ROS2启动文件,创建自定义消息和Turtlebot3服务节点,使用ROS2组件编译视觉管…
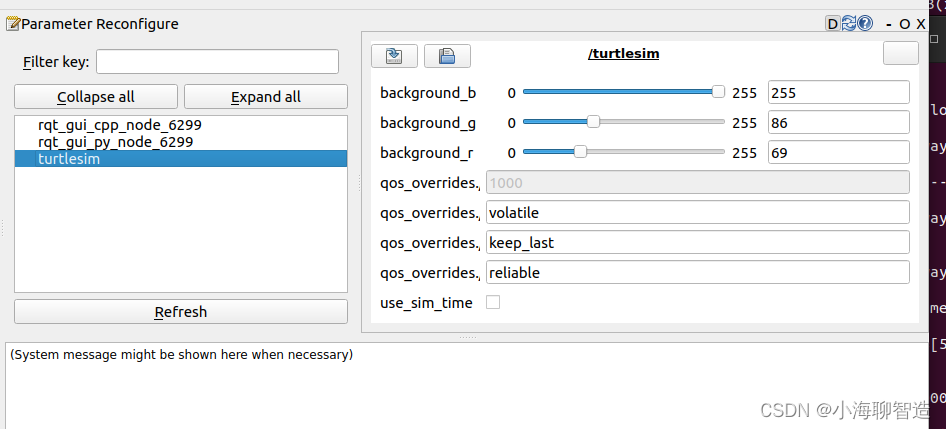
ROS2——Parameters
节点可以使用参数来配置各项操作,这些参数可以说布尔值、整数、字符串等类型。节点在启动时会读取参数。我们将参数单独列出来,而不是写在源文件中,这样做可以方便我们调试,因为在不同的机器人、环境中,我们需要的参数…
Jetson Xavier NX编译Rviz2
目录
容器
编译
foxy
RViz2 容器
修改docker镜像保存路径
$ systemctl show --propertyFragmentPath docker
$ sudo mkdir /ssd/docker
$ sudo vi /lib/systemd/system/docker.service--graph/ssd/docker
$ sudo systemctl daemon-reload
$ sudo service docker restar…
Cpp或Python(ROS2)有限状态机-行为树数学模型及虚拟力场本地导航算法避障
要点
C解释ROS2细节:节点初始化、自定义和接口连接代码片段 回调示例:订阅回调,定时器,服务包括参数调用,接收客户端响应执行器示例:创建一个具有两个节点应用,一个节点启动一个计时器…
使用 rosdep 管理 ROS 2 依赖项
系列文章目录 文章目录 系列文章目录前言 清华源镜像使用一、什么是 rosdep?二、关于 package.xml 文件的一些小知识三、rosdep 是如何工作的?四、如何知道在 package.xml 中输入哪些 key ?五、如何使用 rosdep 工具?5.1 rosdep 安…
不使用屏幕在树莓派4B安装Ubuntu22.04桌面版(64位)
因为时间有限只说一下基本路径:
1首先安装Ubuntu22.04server版本
2设置服务器版本的SSH和WiFi
3通过服务器版本安装Ubuntu-desktop升级到Ubuntu22.04桌面版
4在桌面版上安装远程控制软件:xrdp;
5使用Windows自带的远程桌面连接访问Ubuntu
6完成

【ros2】ros2常用命令汇总
序言 ros常用命令汇总 ros2常用命令总结
1. 功能包package 查看功能包列表 ros2 pkg list创建一个新的功能包 ros2 pkg create --build-type ament_cmake package_name创建功能包时添加依赖项 ros2 pkg create --build-type ament_cmake package-name --dependencies [deps]…
IEEE 机器人最优控制开源库 Model-based Optimization for Robotics
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD2.2 OCPID-DAE12.3 SNOPT 前言
机器人ÿ…

ROS2-IRON Ubuntu-22.0 源码下载失败解决方法 vcs import --input
ROS2 一.ROS2 IRON环境搭建1.设置系统字符集为UTF-82.将RO2 apt 库添加到系统中3.添加ROS2 GPG key4.添加ROS 2 的软件源安装开发工具 二.下载ROS2sh源代码编译 一.ROS2 IRON环境搭建
虚拟机系统:Ubuntu22.04 虚拟机:VMware-player-full-16.2.5-2090451…
如何在任何STM32上面安装micro_ros
就我知道的:micro-ros只能在特定的昂贵的开发板上面运行,但是偶然发现了这个文章,似乎提供了一个全新的方式来在ros2和单片机之间通讯,如果能够这样肯定也能够提高效率,但即使不行,使用串口库也应该比较简单…
ros2+pcl入门范例
简单范例
功能描述
读取一段pcl点云序列,并发布到名为“pt”的topic。然后通过rviz2观察点云
环境准备
ubuntu18.04ros2(eloquent此版本需要于Ubuntu对应) Python(version3.6需要于eloquent对应)PCLEIGENrviz2 具体…

ROS2从入门到精通0-3:VSCode 搭建 ROS2 工程环境
目录 0 专栏介绍1 Ubuntu下安装VSCode1.1 基本安装1.2 将VSCode添加到侧边栏 2 VSCode集成相关插件3 VSCode运行ROS2环境步骤3.1 安装编译依赖项3.2 创建工作空间和源码空间3.3 启动VSCode与配置 4 测试工程环境4.1 C版本4.2 Python版本 0 专栏介绍
本专栏旨在通过对ROS2的系统…
ROS2+NAV2如何快捷的在docker中使用主机的CAN
驱动底盘一般通过CAN口和底盘通信,在docker中使用CAN最方便的方式就是容器(container)在创建(run)时,指定网络为host模式:--network=host。
例如:
docker run -it --restart=always --name ros2humble3 --network=host -v /home/tom/Tom/DockerContent/nav2_ws(your do…
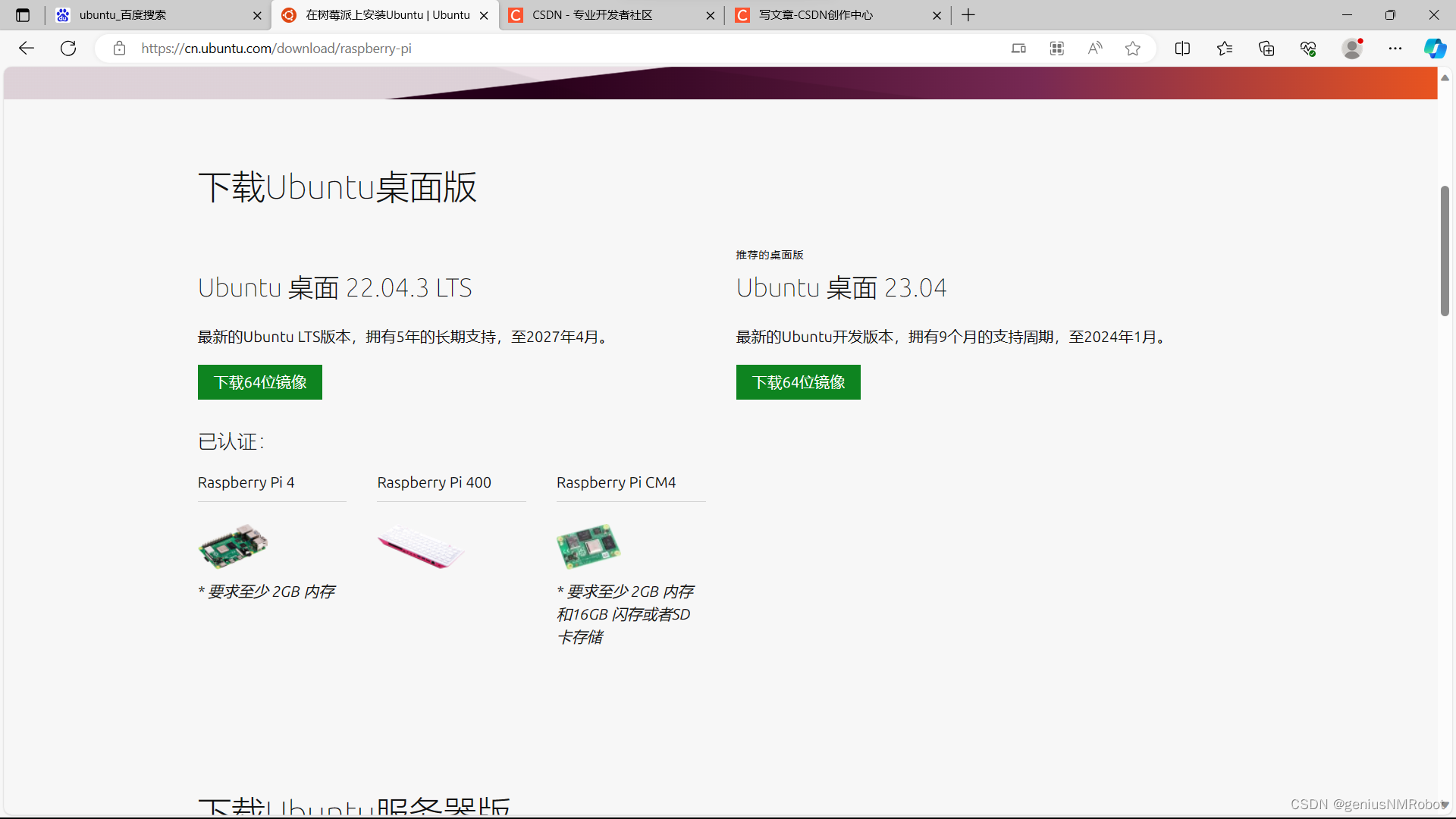
下载树莓派对应的64位Ubuntu系统步骤
说点废话:因为ros2需要安装在64位Ubuntu上面,所以安装64位最合适;
第一步打开https://cn.ubuntu.com/
网站;选择下载--->iot----> 选择这个镜像文件下载。我觉得镜像文件是img格式的,跟iso文件区别是ÿ…

【ROS】ROS2命令行工具详解
1、简介
ROS1中每个功能都使用ros开头的命令行工具,如:roscore、rosrun等 ROS2中只有一个命令行工具ros2,各个功能模块通过参数子命令来实现
~$ ros2 -h
用法: ros2 [-h] [--use-python-default-buffering] <command> ……选项:-h, …

3 ROS2服务通讯基础
ROS2服务通讯基础 3.1 服务通讯介绍3.2 ROS2服务通讯的基本流程3.2.1 创建ROS2服务通讯功能包的基本流程3.2.2 创建ROS2服务通讯功能包示例 3.3 使用C/C实现ROS2服务通讯3.3.1 创建C/C服务通讯服务端功能包并编写节点文件3.3.2 配置C/C服务通讯服务端功能包3.3.3 编译并运行C/C…

ROS2 驱动思岚G4雷达(ydlidar)- Rviz显示
记录G4雷达的配置 系统环境为:Ubuntu22.04 配置步骤
1、安装雷达SDK 2、构建 G4 雷达 ROS2 项目工程文件 3、使用Rviz可视化界面显示 1、安装雷达SDK
1.1 安装CMake
YDLidar SDK需要CMake 2.8.2作为依赖项
Ubuntu 18.04或者Ubuntu 22.04
sudo apt install cmak…
ROS2 学习(一)介绍,环境搭建,以及个人安装的一些建议
ROS2 学习
学习自b站课程:https://www.bilibili.com/video/BV16B4y1Q7jQ?p1 (up主:古月居GYH)
ROS 介绍
Robot OS,为机器人开发提供了相对完善的 middleware,工具,软件等。
ROS1 对嵌入式设…
ros2——Time
参考:http://wiki.ros.org/roscpp/Overview/Time
Time and Duration
ROS 具有内置的 time和duration基元类型,roslib 分别提供 ros::Time 和 ros::Duration 类。 时间是一个特定的时刻(例如“今天下午 5 点”),而Dur…